ASDA-M Chapter 8 Parameters
Revision December, 2014 8-97
Format:
HEX
Settings:
1~50Hz: Low stiffness, low response
51~250Hz: Medium stiffness, medium response
251~850Hz: High stiffness, high response
851~1000Hz: Extremely high stiffness, extremely high response
NOTE
1) According to the speed loop setting of P2-31, the servo drive
sets the position loop response automatically.
2) The function is enabled via parameter P2-32. Please refer to
Chapter 5.6 for corresponding bandwidth size of the setting
value.
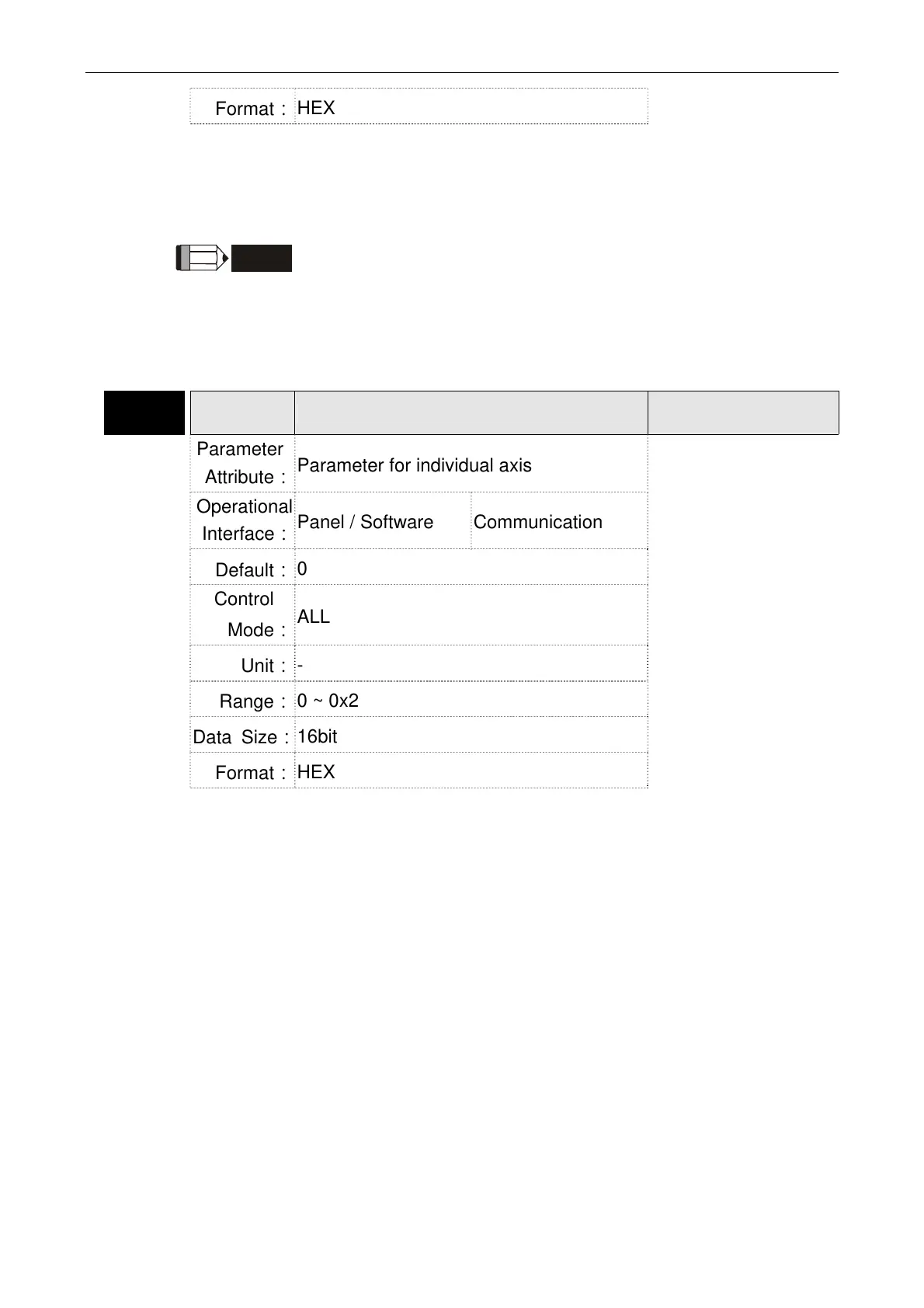
P2-32▲
AUT2 Tuning Mode Selection
Address: 0240H
0241H
Parameter
Attribute:
Parameter for individual axis
Related Section:
Section 5.6
Section 6.3.6
Operational
Interface:
Panel / Software Communication
Default:
0
Control
Mode:
ALL
Unit:
-
Range:
0 ~ 0x2
Data Size:
16bit
Format:
HEX
Settings:
0: Manual Mode
1: Auto Mode (continuous adjustment)
2: Semi-auto Mode (non- continuous adjustment)
Relevant description of manual mode setting:
When P2-32 is set to 0, parameters related to gain control, such
as P2-00, P2-02, P2-04, P2-06, P2-07, P2-25 and P2-26, all can
be set by the user.
When switching mode from auto or semi-auto to manual,
parameters about gain will be updated automatically.
Relevant description of auto mode setting:
Continue to estimate the system inertia, save the inertia ratio to
P1-37 every 30 minutes automatically and refer to the stiffness
and bandwidth setting of P2-31.
 Loading...
Loading...