Chapter 12 Description of Parameter SettingsMS300 (High Speed Model)
12-02-14
Settings Functions Descriptions
50
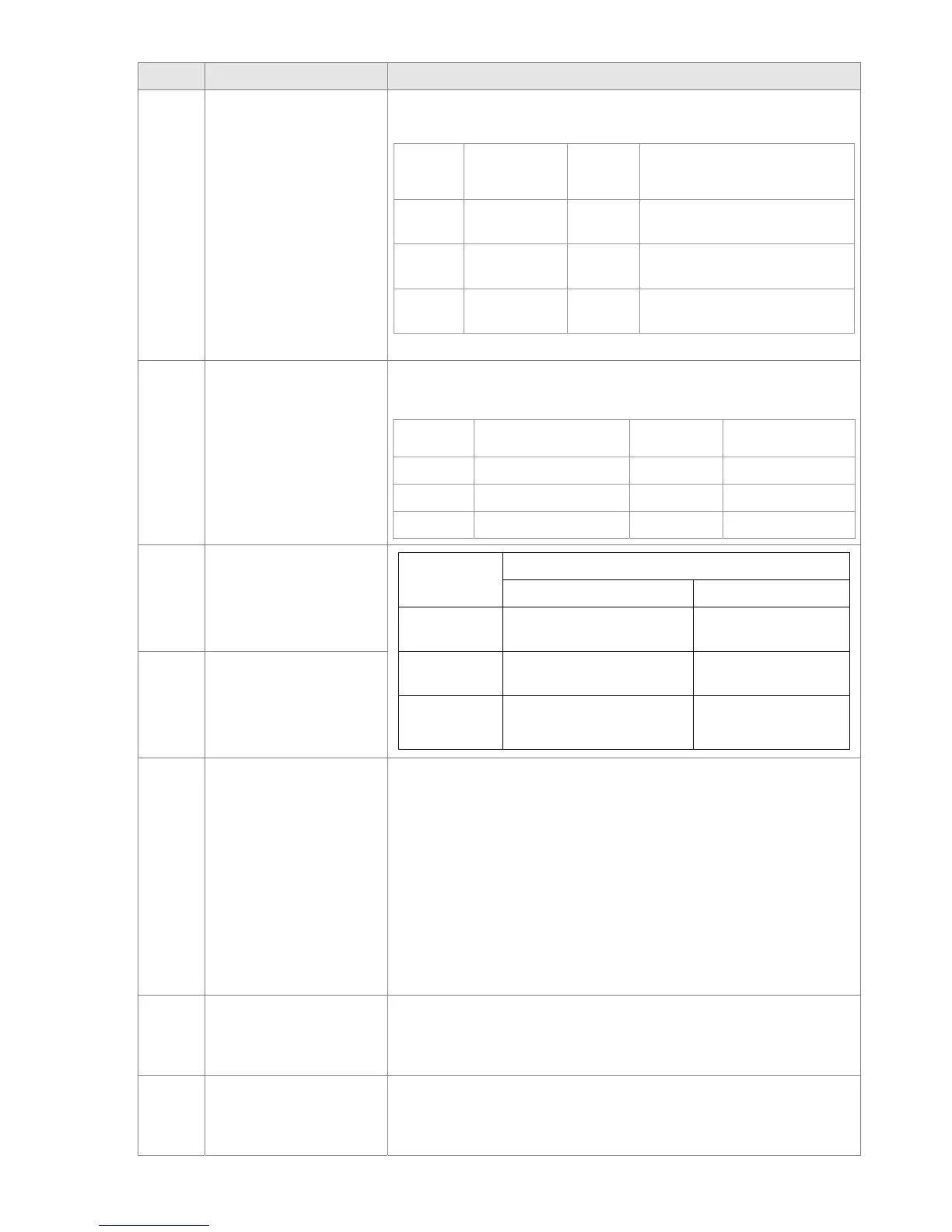
Output for CANopen
control
Control multi-function output terminals by CANopen.
The mapping table of the CANopen DO is as follows:
Physical
terminal
Setting of
related
parameters
Attribute Corresponding index
RY1 Pr. 2-13 = 50 RW
2026-41
bit 0 of initial value 0x01
MO1 Pr. 2-16 = 50 RW
2026-41
bit 3 of initial value 0x01
MO2 Pr. 2-17 = 50 RW
2026-41
bit 4 of initial value 0x01
Refer to Chapter 15-3-5 for more information.
52
Output for
communication card
control
Control output by communication cards (CMM-MOD01,
CMM-EIP01, CMM-PN01, CMM-DN01)
Physical
terminal
Setting of related
parameters
Attribute
Corresponding
Address
RY Pr. 02-13 = 51 RW bit 0 of 2640
MO1 Pr. 02-16 = 51 RW bit 3 of 2640
MO2 Pr. 02-17 = 51 RW bit 4 of 2640
66 SO output logic A
Status of
drive
Status of safety output
Status A (MO = 66) Status B (MO = 68)
Normal
Broken circuit
(Open)
Short circuit
(Close)
STO Short circuit (Close)
Broken circuit
(Open)
STL1~STL
3
Short circuit (Close)
Broken circuit
(Open)
68 SO output logic B
67
Analog input level
reached output
Multi-function output terminals operate when analog input level is
between high level and low level.
03-44: Select one of the analog input channels (AVI, ACI) to be
compared.
03-45: The high level of analog input, factory setting is 50 %.
03-46: The low level of analog input, factory setting is 10 %.
If analog input > 03-45, multi-function output terminal operates.
If analog input < 03-46, multi-function output terminal stops
output.
73 Over torque 3
Active when over torque is detected. Pr. 14-75 is for setting
over-torque detection level. Pr. 14-76 is for setting over-torque
detection time. (Refer to Pr. 14-74~14-76)
74 Over torque 4
Active when over torque is detected. Pr. 14-78 is for setting
over-torque detection level. Pr. 14-79 is for setting over-torque
detection time. (Refer to Pr. 14-77~14-79)
 Loading...
Loading...



