原文取扱説明書
5.3.5.9 - 他段階へジャンプ
(標準モードと ECPHT モード)
この位相により、より一層精巧なサイクルを立案
できます。例: D F1 V1 F2 — F3 J1
D 位相1 ランダウン速度
F1 位相2 最終速度
V1 位相3 NOKへのアクションNOK の場合、
段階 6 (F3) ELSE 作動段階 4 (F2)
にジャンプした後停止します。
F2 P 位相4 最終速度
— 位相5 空段階サイクルは停止
F3 位相6 位相2(V1) でNOK の場合のSCY 位
相。
J1 位相7 位相(F2)4 を終了させるために
ジャンプします。
位相 RP 無し
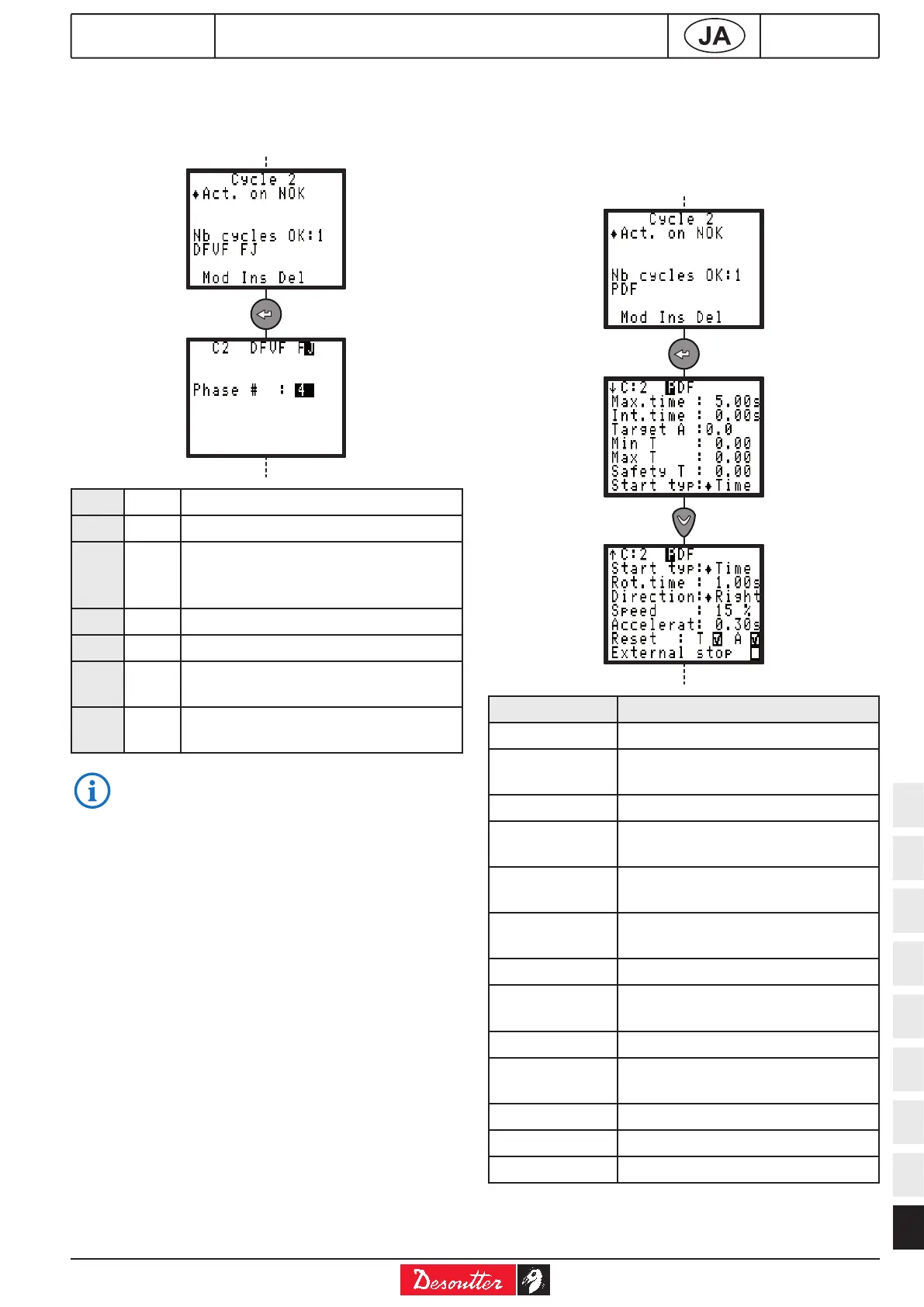
5.3.5.10 - トルク実行段階 (標準モードのみ)
この位相は ねじかナットの負荷瞬間( 支配トルク)
をモニターできます。
モーターとメカニズムを始動するとき、初期時間
オーバー( 時間と角度で表示されている) は 衝撃
パルスを排除できます。
パラメータ コメント
Max. time 逆回転時間: 0.01 - 99 s.
Int.time この位相と次の位相間のプログ
ラミングされた時間 : 0 - 20 秒.
Target A ターゲット角度: 0 - 9999°.
Min T 最小トルク: 0 から主軸の最大値
まで
Max T 最大トルク: 0 から主軸の最大値
まで
Safety T 安全トルク: 0 から主軸の最大値
まで
Start typ 起動のタイプ: 時間/ 角度
Rot.angl. or
Rot.time
角度又は回転時間: 0-9999 度又
は 0 - 20 s
Direction 方向: (右/左)
Speed (回転速度)
(回転速度) : 0 - 100 %.
Accelerat (加速) 0 ~ 20 秒
Reset: Angle (リセット角度) はい/ いいえ
Reset: Torque (リセットトルク) はい/ いいえ

 Loading...
Loading...









