原文取扱説明書
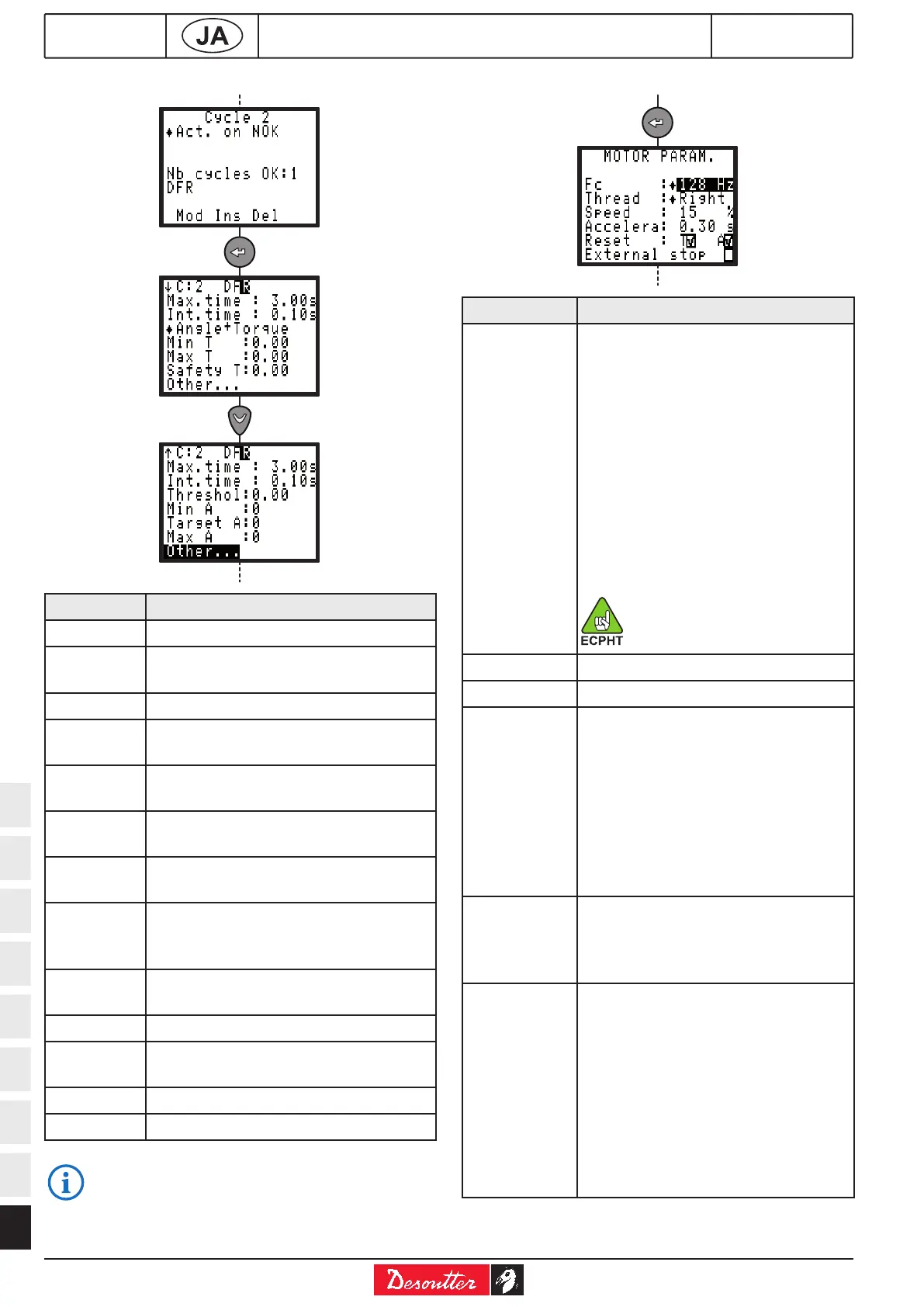
5.3.5.7 - 逆回転段階 (標準モードと ECPHT モード)
パラメータ コメント
Max. time 逆回転時間: 0.01 - 99 s.
Int.time この位相と次の位相間のプログラミ
ングされた時間 : 0 - 20 秒.
Strategy トルク/ トルク+ 角度/ 角度+ トルク.
Min T 最小トルク: 0 Nm から主軸の最大値
まで
Target T 目標トルク: 0 Nm から主軸の最大値
まで( トルク又はトルク + 角度)
Max T 最小トルク: 0 Nm から主軸の最大値
まで
Safety T 安全トルク: 0 Nm から主軸の最大値
まで
B-away T 破壊トルク: トルク制御開始 (締め付
け方式: トルク又はトルク + 角度).
最終トルクより高いです。
Threshold 角度の敷居: 0 Nm から主軸の最大値
まで
Min A 最小角度 : 0 - 9999°
Target A Target angle: 0 - 9999°
( 角度 + トルク).
Max A 最大角度 : 0 - 9999°
Other... モーターパラメータ参照。
詳細RP54ページの「締め付け戦略ガイド」 (
トルク、トルク + 角度 + トルクと実行トル
ク)を参照。
5.3.5.8 - モーターパラメータ
パラメータ コメント
Fc(Hz) 帯幅調整 4 - 128Hz。この値を減
少することによって、"torque" 信
号にあるの誤りを濾過してインス
トール(Cp 又は Cam) されたトル
クの分散を改善することが出来ま
す。それは "Crowfoot" ヘッドを
使っているときに、極めて役立つ
かもしれません。
警告: その結果、トルク(Cpk) 調
整は改修されるかもしれません。
アセンブリ上のツール調整により
調整化 (「CALIBRATION メニュ
ー」44)。
入力されたカットオフ頻
度は、ECPHT では無効。
Thread 右/左
Speed 回転速度 : 0 - 100 %.
Acceler 0 ~ 20 秒
ある速度から別の速度への加速時
間または減速時間。このパラメー
タは最初の段階と、段階間の時間
がゼロでないときに有効化できま
す。
インター位相 時間が0たった
ら、加速器は自動的に最適化され
ます。
Reset このリセット機能は、該当位相の
初めごろに、トルク と(又は)
角度の値をリセットすることが出
来ます。
External stop Yes/No システムが現在の段階を
停止し、次の段階に進むには、次
の条件が守られなければなりませ
ん。
”外側の停止” 位相は、この場面
では”yes” の状態でなければい
けません。
入力/出力コネクターの” 外側
の停止” 入力での信号は”1” に移
行しなければいけません。

 Loading...
Loading...









