111
2 Modo de funcionamiento
ES
2 Modo de funcionamiento
2.1 Funcionamiento
Con el modelo "Fusion" ha adquirido un robot
aspirador que trabaja de forma totalmente au-
tomática.
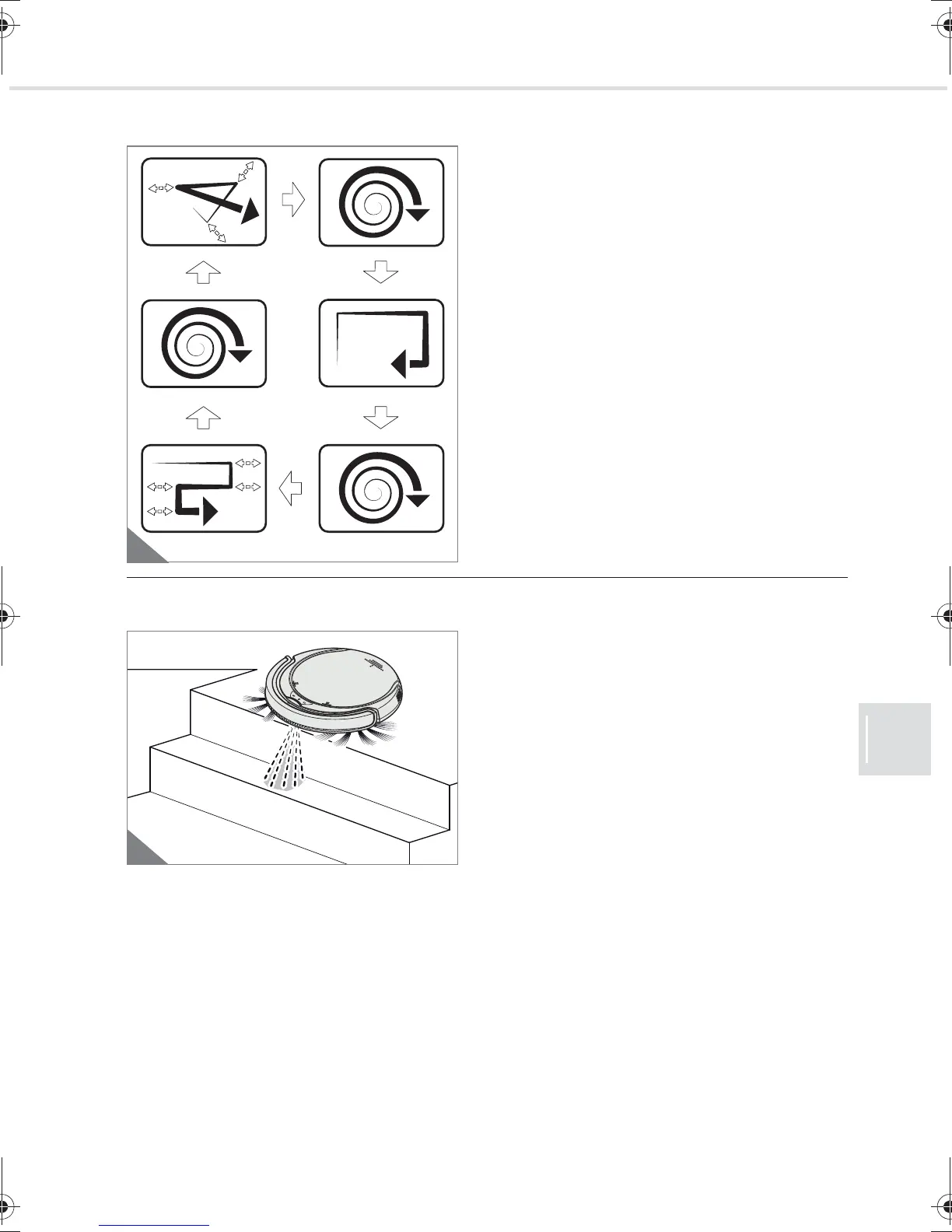
El robot limpia siguiendo el siguiente esque-
ma (Fig. 4):
#"Modo aleatorio" Z "Modo circular" Z Modo
de bordes Z "Modo circular“ Z "Modo de ban-
das" Z "Modo circular" Z "Modo aleatorio“
Si el aparato no se desconecta al finalizar el
ciclo, este vuelve a comenzar.
Este desarrollo del programa permite la lim-
pieza ininterrumpida basada en bandas sola-
padas. El requisito para ello es que el recinto
no sea demasiado grande y el aparato no
choque demasiado pronto con un obstáculo
en el "modo circular".
Si el aparato choca con un obstáculo en el
"modo circular", pasa inmediatamente al "mo-
do de bordes".
2.2 Seguro contra caídas
Con la ayuda de 3 sensores de caída, su ro-
bot aspirador detecta automáticamente los
bordes de precipicios (Fig. 5). Entonces cam-
bia su dirección de marcha y continúa lim-
piando en el sentido opuesto.
Las superficies más bajas, p. ej. escalones,
se detectan y se omiten en la limpieza.
La sensibilidad de los sensores de caída es
regulable, Zcapítulo 7.1, "Ajustar la
sensibilidad de los sensores de caída".
M611.book Seite 111 Donnerstag, 2. Juli 2015 8:54 08