137
2 Funzionamento
IT
2 Funzionamento
2.1 Modalità operative
Con il robot aspirapolvere „Fusion“ avete ac-
quistato un robot aspirapolvere dal funziona-
mento interamente automatico.
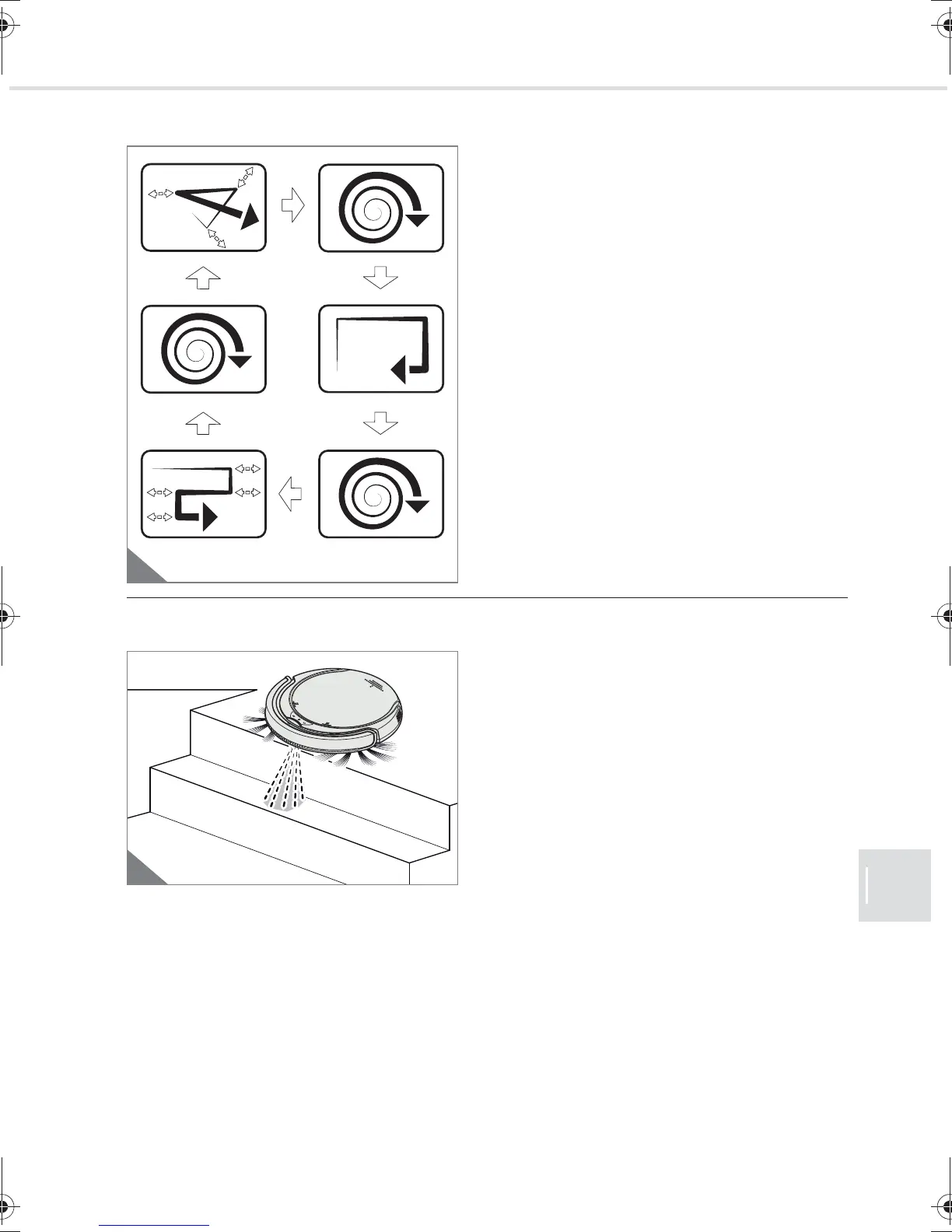
Il vostro robot pulisce secondo il seguente
schema (Fig. 4):
„Modalità random“ Z „Modalità a trottola“ Z
Modalità angoli Z „Modalità a trottola“ Z „Mo-
dalità a strisce“ Z „Modalità a trottola“ Z „Mo-
dalità random“
Se l'apparecchio non viene spento al termine
di questo ciclo, il ciclo ricomincia.
Questa sequenza di programmi consente una
pulizia senza soluzione di continuità a strisce
sovrapposte. La premessa è che l'ambiente
non sia troppo grande e che nella „modalità a
trottola“ l'apparecchio non si scontri troppo
presto con un ostacolo.
Se l'apparecchio si scontra con un ostacolo
quando è nella „modalità a trottola“ passa im-
mediatamente alla „modalità angoli“.
2.2 Protezione dalle cadute
Il robot aspirapavimenti riconosce autonoma-
mente mediante tre sensori di caduta even-
tuali dislivelli presenti davanti ad esso (Fig. 5).
In questo caso cambia direzione di marcia e
continua a pulire nella direzione opposta.
Eventuali superfici ribassate, come ad es. i
gradini, sono riconosciute ed escluse dalla
pulizia.
E' possibile regolare la sensibilità dei sensori
di caduta, ZCapitolo 7.1, "Regolare la
sensibilità dei sensori di caduta".
M611.book Seite 137 Donnerstag, 2. Juli 2015 8:54 08