163
2 Fonksiyon úekli
TR
2 Fonksiyon úekli
2.1 ÇalÕúma úekli
Süpürme Robotu "Fusion" ile tam otomatik
çalÕúan bir süpürme robotuna sahip oldunuz.
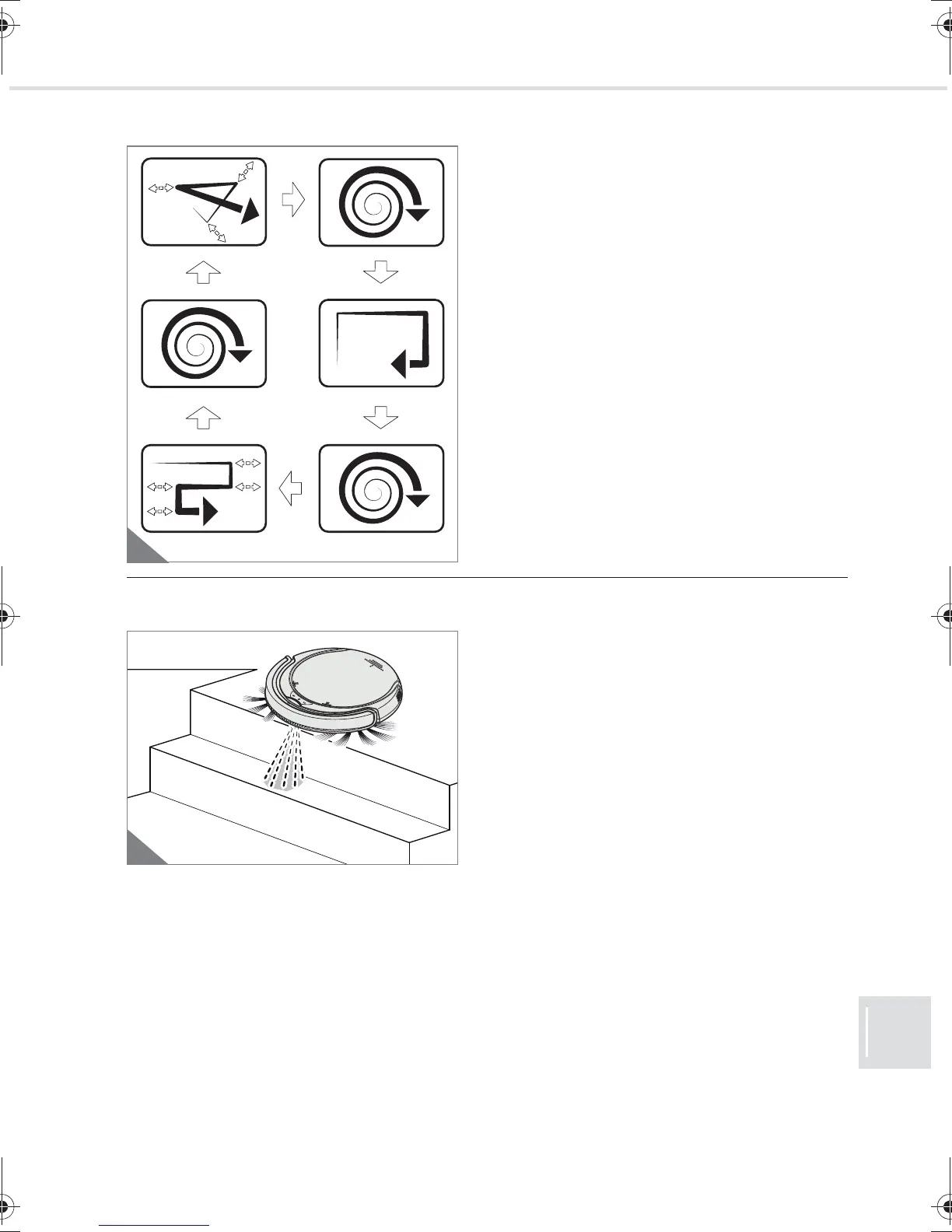
Süpürme robotunuz aúa÷Õdaki úemaya göre
çalÕúÕr (Res. 4):
„Tesadüf modu“ Z „Dönme modu“ Z Kenar
modu Z „Dönme modu“ Z „Hat modu“ Z
„Dönme modu“ Z „Tesadüf modu“
E÷er cihaz, devrenin sonunda kapatÕlmazsa,
devre tekrar baúlar.
Bu program sÕrasÕ, üst üste binen hatlar teme-
linde aralÕksÕz temizli÷e imkan tanÕr. Bunun
için önkoúul, odanÕn çok büyük olmamasÕ ve
cihazÕn "dönme modunda" çok erken bir en-
gele takÕlmamasÕdÕr.
E÷er cihaz "dairesel modda" bir engele denk
gelirse, hemen "kenar moduna" geçer.
2.2 Düúme emniyeti
Süpürme robotunuz, 3 düúme sensörü yardÕ-
mÕyla kendili÷inden önündeki düúük zeminleri
tanÕr (Res. 5) Bunun üzerine hareket yönünü
de÷iútirir ve aksi yönde temizli÷ine devam
eder.
Örne÷in merdiven basamaklarÕ gibi derinde
kalan yüzeyler algÕlanÕr ve böylece temizlik dÕ-
úÕnda tutulur.
Düúme sensörlerinin hassasiyetini ayarlaya-
bilirsiniz, ZBölüm 7.1, "Düúme sensörlerinin
hassasiyetini ayarlayÕn".
M611.book Seite 163 Donnerstag, 2. Juli 2015 8:54 08