148
8Uso
8Uso
8.1 Pulizia di pavimenti duri
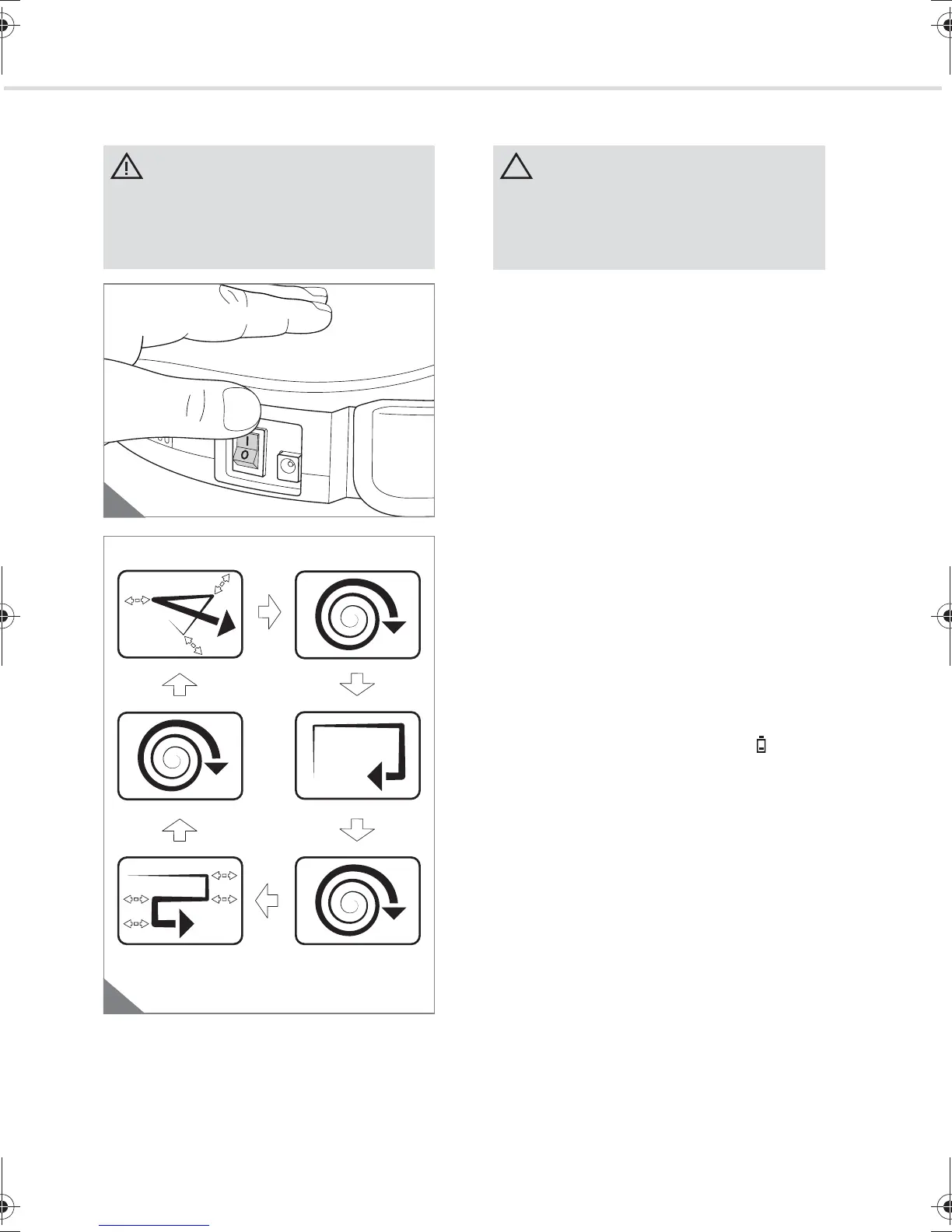
1. Disporre l'apparecchio sul pavimento e
accenderlo con l'interruttore ON/OFF
(Fig. 23). In alternativa l'apparecchio può
essere avviato anche attraverso la stazio-
ne di carica, ZCapitolo 6.
L'apparecchio inizia il ciclo di pulizia. I
due LED esterni lampeggiano alternativa-
mente.
Adesso il vostro robot pulisce seguendo il
seguente schema (Fig. 24): „Modalità ran-
dom“ Z „Modalità a trottola“ Z Modalità
angoli Z „Modalità a trottola“ Z „Modalità
a strisce“ Z „Modalità a trottola“ Z „Moda-
lità random“
Nella modalità a trottola, non appena l'ap-
parecchio si scontra con un ostacolo, pas-
sa alla „modalità di inseguimento“
(Fig. 24).
Se l'apparecchio si è bloccato contro un
ostacolo dargli una spintarella con la mano.
Quando la potenza del pacco batterie di-
minuisce, la spia della batteria „ “ si illu-
mina in rosso in maniera continua. Adesso
possono verificarsi le 2 situazioni che se-
guono:
- il robot si trova alla portata della sta-
zione di carica: il robot proverà ad ag-
ganciarsi autonomamente alla stazione
di carica. Se non ci riesce, vogliate dare
una mano, ZCapitolo 6.
- il robot non si trova alla portata della
stazione di carica: ogni 60 secondi il
robot emette segnali acustici in modo da
poterlo ritrovare facilmente. (Se il pacco
batterie è completamente scarico, an-
che questa funzione di emissione di se-
gnali acustici è disattivata.)
Adesso vi sono 2 possibilità:
- carica attraverso l'alimentatore,
ZCapitolo 5
- carica attraverso la stazione di carica,
ZCapitolo 6.
Pericolo di lesioni! L'apparecchio può
essere lasciato funzionare incustodito, ma
occorre fare attenzione a non calpestarlo,
con conseguenti possibili cadute.
Benché il robot aspirapavimenti sia in grado
di identificare i dislivelli, sconsigliamo cal-
damente di utilizzarlo su mobili e simili. Non
è infatti idoneo per questa applicazione.
M611.book Seite 148 Donnerstag, 2. Juli 2015 8:54 08