Introduction
Parameter
x.00
Parameter
description format
Keypad and
display
Serial
communications
CT Modbus
RTU
PLC Ladder
programming
CTSoft Menu 0
Advanced parameter
descriptions
Menu 11
Commander SK Advanced User Guide 145
Issue Number: 9 www.controltechniques.com
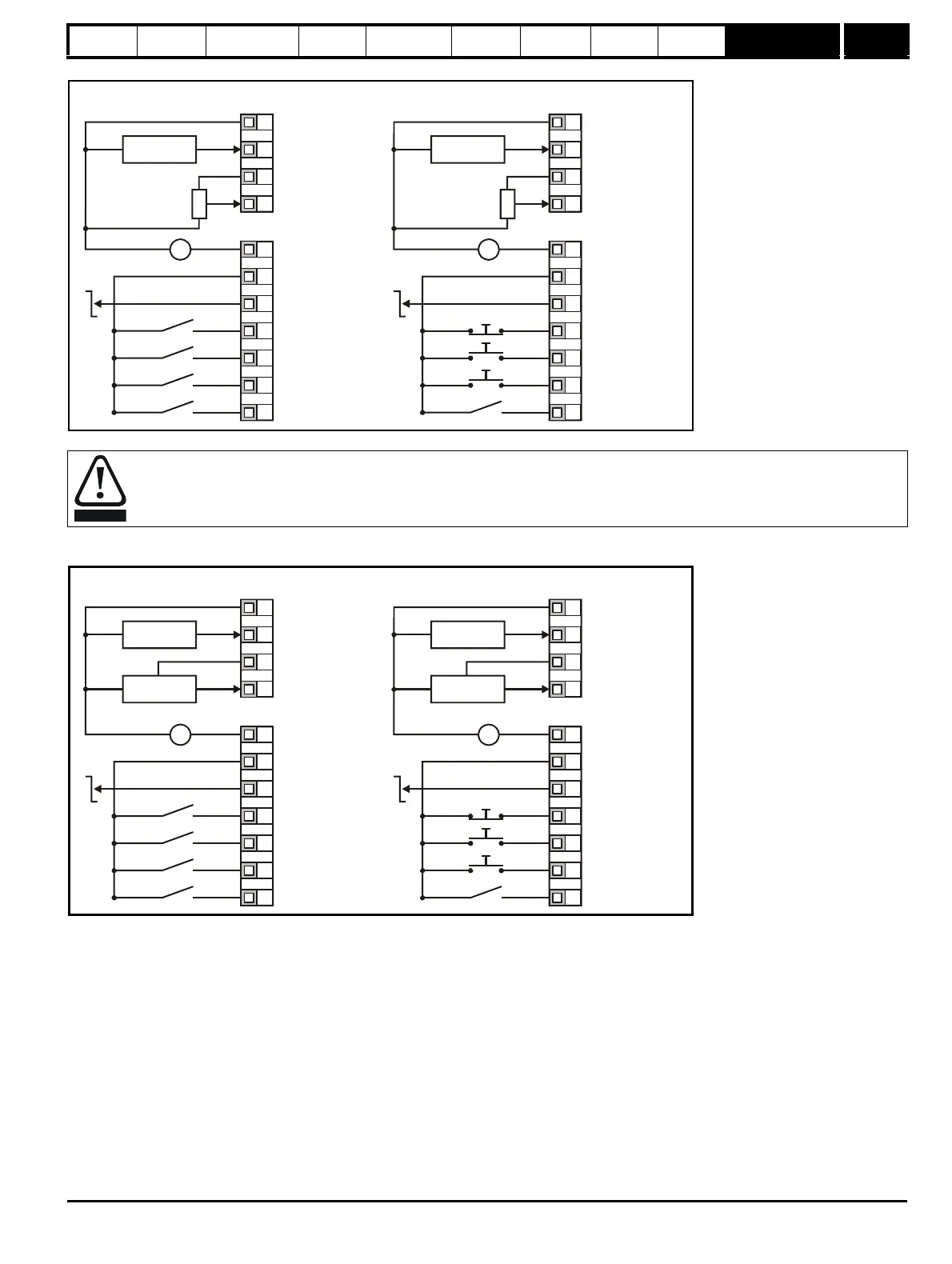
Figure 10-32 Pr 11.27 = tor
Figure 10-33 Pr 11.27 = Pid
When Pr 11.27 is set to Pid, the following parameters are made available for adjustment:
•Pr 14.10: PID proportional gain
•Pr 14.11: PID integral gain
•Pr 14.06: PID feedback invert
•Pr 14.13: PID high limit (%)
•Pr 14.14: PID low limit (%)
•Pr 14.01: PID output (%)
When torque mode is selected and the drive is connected to an unloaded motor, the motor speed may increase rapidly to the maximum
speed (Pr 02 +20%)
0V
Remote current speed
reference input (A1)
+10V reference output
Torque reference
input (A2)
+24V output
Drive Enable/Reset
Run Forward
Run Reverse
Torque mode
select
Remote speed
reference input
V
_
+
10k
(2kmin)
+24V
0V
Eur USA
Analog output
(motor speed)
Digital output
(zero speed)
0V
Remote current speed
reference input (A1)
Torque reference
input (A2)
select
Remote speed
reference input
V
_
+
10k
(2kmin)
+24V
0V
(zero speed)
T1
T2
T3
T4
B1
B2
B3
B4
B5
B6
B7
T1
T2
T3
T4
B1
B2
B3
B4
B5
B6
B7
0V
+10V reference output
+24V output
Drive Enable/Reset
Run Forward
Run Reverse
4-20mA PID
feedback input
V
_
+
+24V
0V
Eur USA
Analog output
(motor speed)
Digital output
(zero speed)
PID feedback input
PID reference input
PID enable
0-10V PID
reference input
0V
/Stop
Run
Jog
4-20mA PID
feedback input
V
_
+
+24V
0V
PID enable
0-10V PID
reference input
PID feedback input
T1
T2
T3
T4
B1
B2
B3
B4
B5
B6
B7
T1
T2
T3
T4
B1
B2
B3
B4
B5
B6
B7