PID Function Block
March 2006
5-89
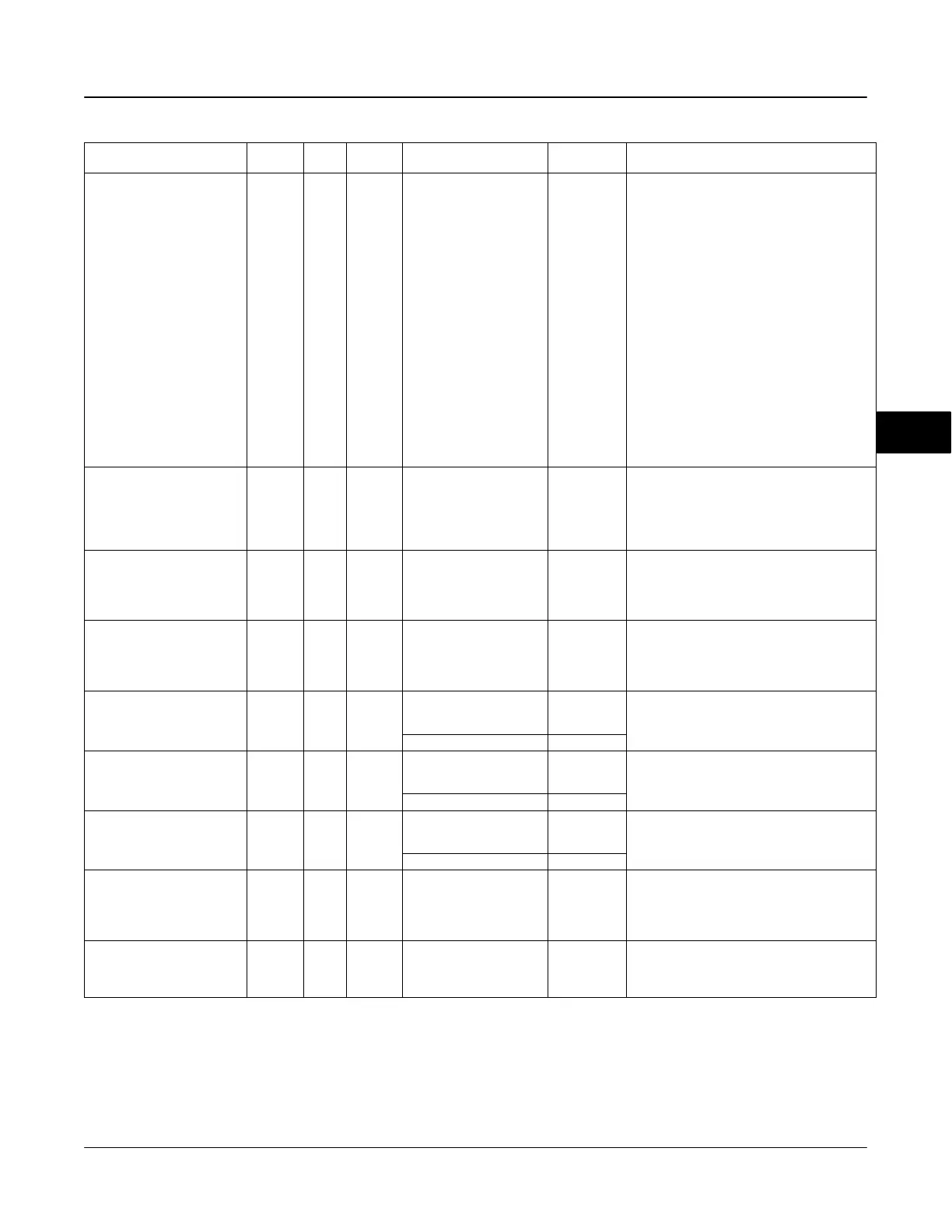
Table 5-31. PID Function Block System Parameters Definitions (Continued)
Label
PARAMETER_NAME
DescriptionInitial ValueRange
Block
Mode
RO /
RW
Index
Number
Shed Options
SHED_OPT
34 ALL
0=Invalid
1=Normal Shed, Normal
Return
2=Normal Shed, No Return
3=Shed to Auto, normal
return
4=Shed to Auto, no return.
Target mode changes to
Auto on detection of a shed
condition
5=Shed to Manual, normal
return
6=Shed to Manual, No
return. Target mode
changes to MAN on
detection of a shed
condition.
7=Shed to retained target,
normal return
8=Shed to retained target,
no return. (Change target
to retained target)
0=Invalid
Data Type: Uint8
Defines action to be taken on remote control
device timeout.
Normal Return − actual mode changes to the
next lowest priority non−remote mode permitted
but returns to the target remote mode when the
remote computer completes the initialization
handshake.
No Return − Target mode changes to the next
lowest priority non−remote mode permitted. The
target remote mode is lost, so no return occurs.
Remote Cascade Output
RCAS_OUT
35 RO N/A Dynamic
Data Type: DS-65
Block setpoint and status after ramping, filtering,
and limiting that is provided to a supervisory host
for back calculation to allow action to be taken
under limiting conditions or mode change. Used
when mode is RCAS.
Remote Out Output
ROUT_OUT
36 RO N/A Dynamic
Data Type: DS-65
Block output that is provided to a supervisory
host for a back calculation to allow action to be
taken under limiting conditions or mode change.
Used when mode is RCAS.
Tracking Scale
TRK_SCALE
37
MAN
OOS
100
0
%
2
Data Type: DS-68
The high and low scale values, engineering units
code, and number of digits to the right of the
decimal point associated with the external
tracking value (TRK_VAL).
Tracking Input Discrete
TRK_IN_D
38 ALL
Status
BAD:
NC:
const
Data Type: DS-66
Discrete input that initiates external tracking of
the block output to the value specified by
TRK_VAL.
Value 0
Tracking Value
TRK_VAL
39 ALL
Status
BAD:
NC:
const
Data Type: DS-65
The value (after scaling from TRK_SCALE to
OUT_SCALE) applied to OUT in LO mode when
external tracking is enabled by TRK_IN_D.
Value 0
Feed Forward Value
FF_VAL
40 ALL
Status
BAD:
NC:
const
Data Type: DS-65
The feedforward control input value and status.
Value 0
Feed Forward Scale
FF_SCALE
41
MAN
OOS
100
0
%
2
Data Type: DS-68
The high and low scale values, engineering units
code, and number of digits to the right of the
decimal point associated with the feedforward
value (FF_VAL).
Feed Forward Gain
FF_GAIN
42
MAN
OOS
0
Data Type: Float
The feedforward gain value. FF_VAL is multiplied
by FF_GAIN before it is added to the calculated
control output. A value of 0 disables feedforward.
−Continued−
5
 Loading...
Loading...







