32 Commander SK Getting Started Guide
www.controltechniques.com Issue Number: 9
Enter the motor rated power factor cos ϕ (taken from the motor name plate).
L1: Level 1 access - only the first 10 parameters can be accessed
L2: Level 2 access - All parameters from 01 to 60 can be accessed
L3: Level 3 access - All parameters from 01 to 95 can be accessed
LoC: Used to lock a security code in the drive. See section 5.6 Security codes on
page 24 for further details.
6.2 Parameter descriptions - Level 2
*Jog can be used without the /Stop being active.
diS: Mechanical brake software disabled
rEL: Mechanical brake software enabled. Brake control via relay T5 & T6. The digital
output on terminal B3 is automatically programmed as a drive ok output.
d IO: Mechanical brake software enabled. Brake control via digital output B3. The relay
outputs on terminals T5 and T6 are automatically programmed as a drive ok
output.
USEr:Mechanical brake software enabled. Brake control to be programmed by user.
The relay and digital output are not programmed. The user should programme the
brake control to either the digital output or relay. The output not programmed to
the brake control can be programmed to indicate the required signal. (See
Commander SK Advanced User Guide.)
No Function Range Defaults Type
09
Motor power factor 0 to 1 0.85 RW
The power factor value could be automatically changed after a rotating autotune. See Pr
38 on page 37.
No Function Range Defaults Type
10
Parameter access L1, L2, L3, LoC L1 RW
No Function Range Defaults Type
11
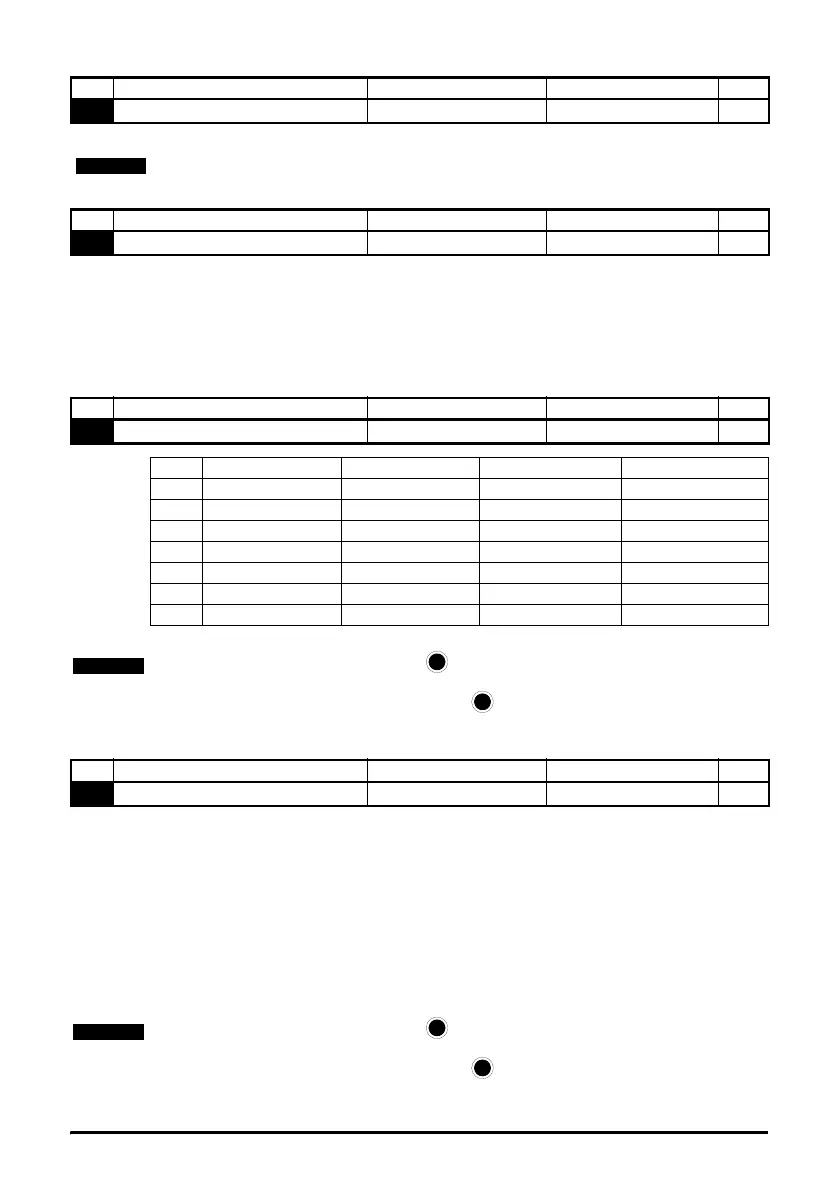
Start/Stop logic select 0 to 6 Eur: 0, USA: 4 RW
Pr 11 Terminal B4 Terminal B5 Terminal B6 Latching
0 Enable Run Forward Run Reverse No
1 /Stop Run Forward Run Reverse Yes
2 Enable Run Forward / Reverse No
3 /Stop Run Forward / Reverse Yes
4 /Stop Run Jog* Yes
5 User programmable Run Forward Run Reverse No
6 User Programmable User Programmable User Programmable User Programmable
A change to Pr 11 is set by pressing the MODE key on exit from parameter edit mode.
The drive must be disabled, stopped or tripped for a change to take place. If Pr 11 is
changed while the drive is running, when the MODE key is pressed on exit from
parameter edit mode, Pr 11 will change back to its previous value.
No Function Range Defaults Type
12
Brake controller enable diS, rEL, d IO, USEr diS RW
A change to Pr 12 is set by pressing the MODE key on exit from parameter edit mode.
The drive must be disabled, stopped or tripped for a change to take place. If Pr 12 is
changed while the drive is running, when the MODE key is pressed on exit from
parameter edit mode, Pr 12 will change back to its previous value.