4-79
Speed loop proportion gain
Speed loop integration gain
Speed loop differential gain
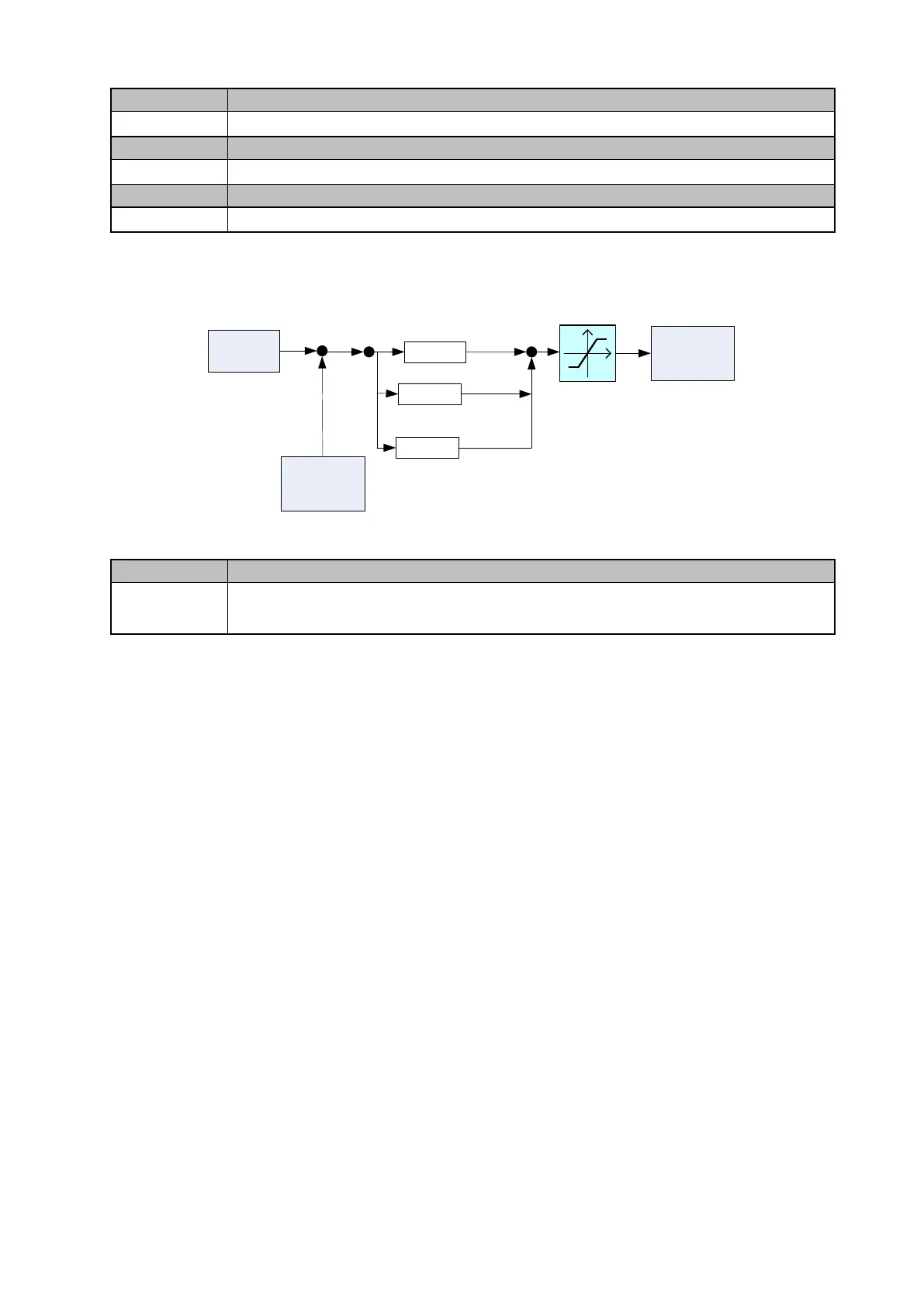
SLV control mode use a output speed estimator as speed feedback value. Speed control
system adjusts the output frequency to follow the value of speed feedback command.
The output frequency from the speed control system is then used to adjust the torque reference
as shown in the diagram below..
P(11-18)
I(11-19)
+
-
Frequency
Reference
Speed
Observer
Feedback
D(11-20)
+
+
+
Torque
Reference
Torque
Limit
Range
0
Enable Stop Key when Run Command not from Keypad
【1】:Disable Stop Key when Run Command not from Keypad
When run command comes from control terminal (00-02=1) or communication (00-02=2), this
parameter can be enabled or disabled the stop key function of keypad.

 Loading...
Loading...






