46
Trainer / student
In this menu line you can assign a “transfer switch” for
trainer (trainer / student) mode operations, after pres-
sing SELECT or ENTER, as described on page 25.
For more information on Trainer systems please refer to
page 110.
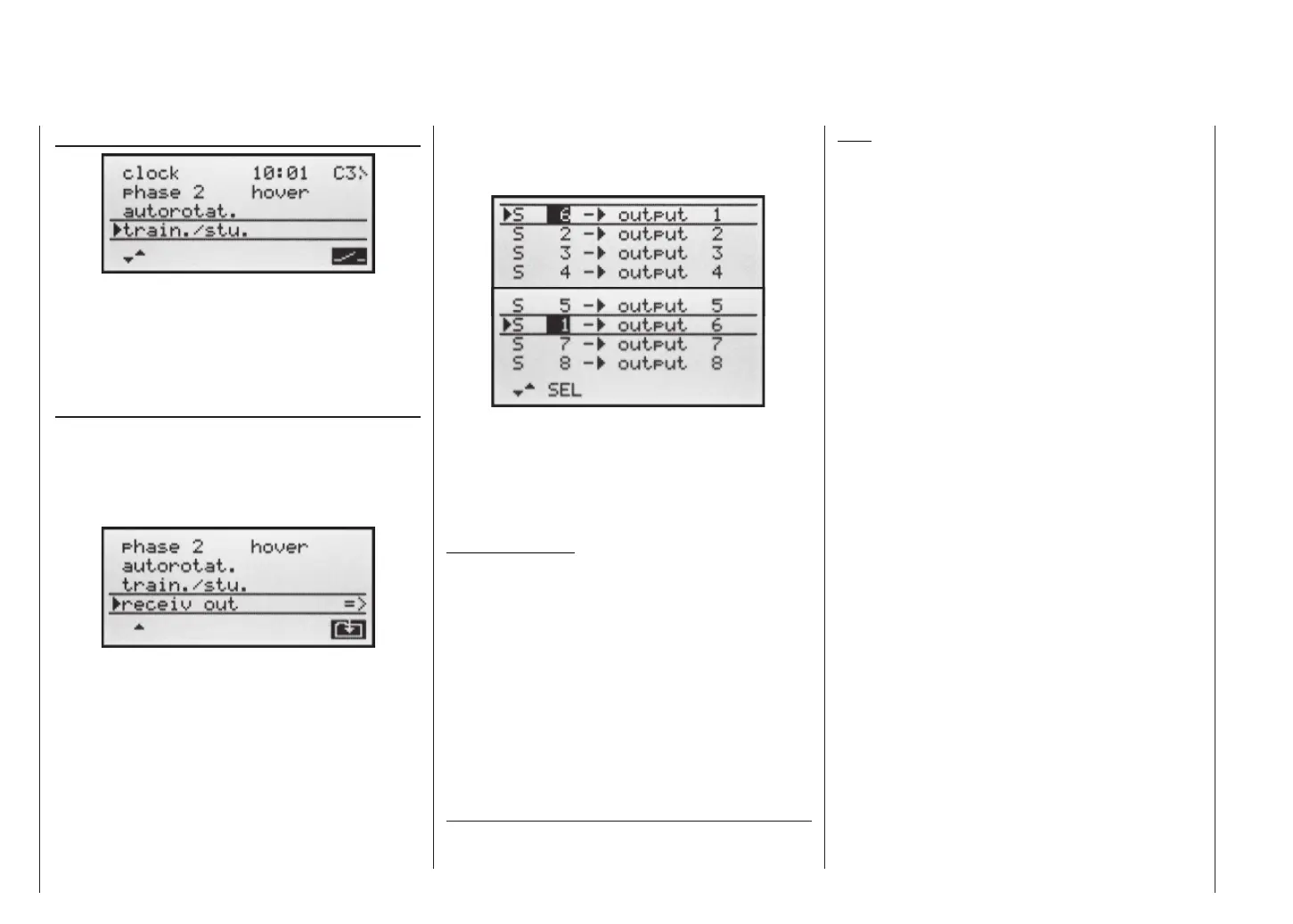
Receiver output
For maximum fl exibility in terms of receiver socket as-
signment, the mx-16s program provides the means to
swap over the servo outputs 1 to max. 8; this is carried
out on the second page of the »receiver output« sub-
menu.
Press the SELECT or ENTER button to move to the
next page of the display. Here you can assign the “con-
trol channels” for servos 1 … 8 to any receiver out-
put you wish to use. However, please note that the dis-
play in »Servo display« – which you can reach by pres-
sing SELECT from the basic display – refers exclusively
to the “control channels”, i.e. the outputs are not swap-
ped over.
With the SELECT button held pressed in, use the right-
hand rocker button to select the servo / output combina-
Base settings – Model helicopter
*
GRAUPNER does not guarantee that GRAUPNER radio control sys-
tems will work correctly in conjunction with receiving systems and
radio control equipment made by other manufacturers.
tion you wish to change, then press ENTER or SELECT.
Now you can assign the desired servo(s) to the selected
output using the right-hand rocker button … or alterna-
tively press CLEAR to revert to the default sequence.
Please note that any changes to servo settings, such
as servo travel, Dual Rate / Expo, mixers etc., must be
carried out according to the original (default) recei-
ver socket sequence.
Typical applications:
• In the helicopter program of the mx-16s the outputs
for one collective pitch servo and the throttle ser-
vo have been interchanged compared to all earlier
GRAUPNER/JR mc-systems. The throttle servo is
now assigned to receiver output “6” and the collecti-
ve pitch servo to output “1”. You may therefore wish to
retain the earlier confi guration.
• It may also prove necessary to swap servos for Trai-
ner mode operations, if you are using a model set up
for another make * of equipment, to avoid having to
re-connect the servos at the receiver.
Note:
Please note that the Fail-safe “hold-mode” and “position”
programming in SPCM mode always affect the “outputs”,
i.e. the receiver socket numbers; this still applies if you
swap the receiver outputs.