54 1018854 12/2015 V01
M512P
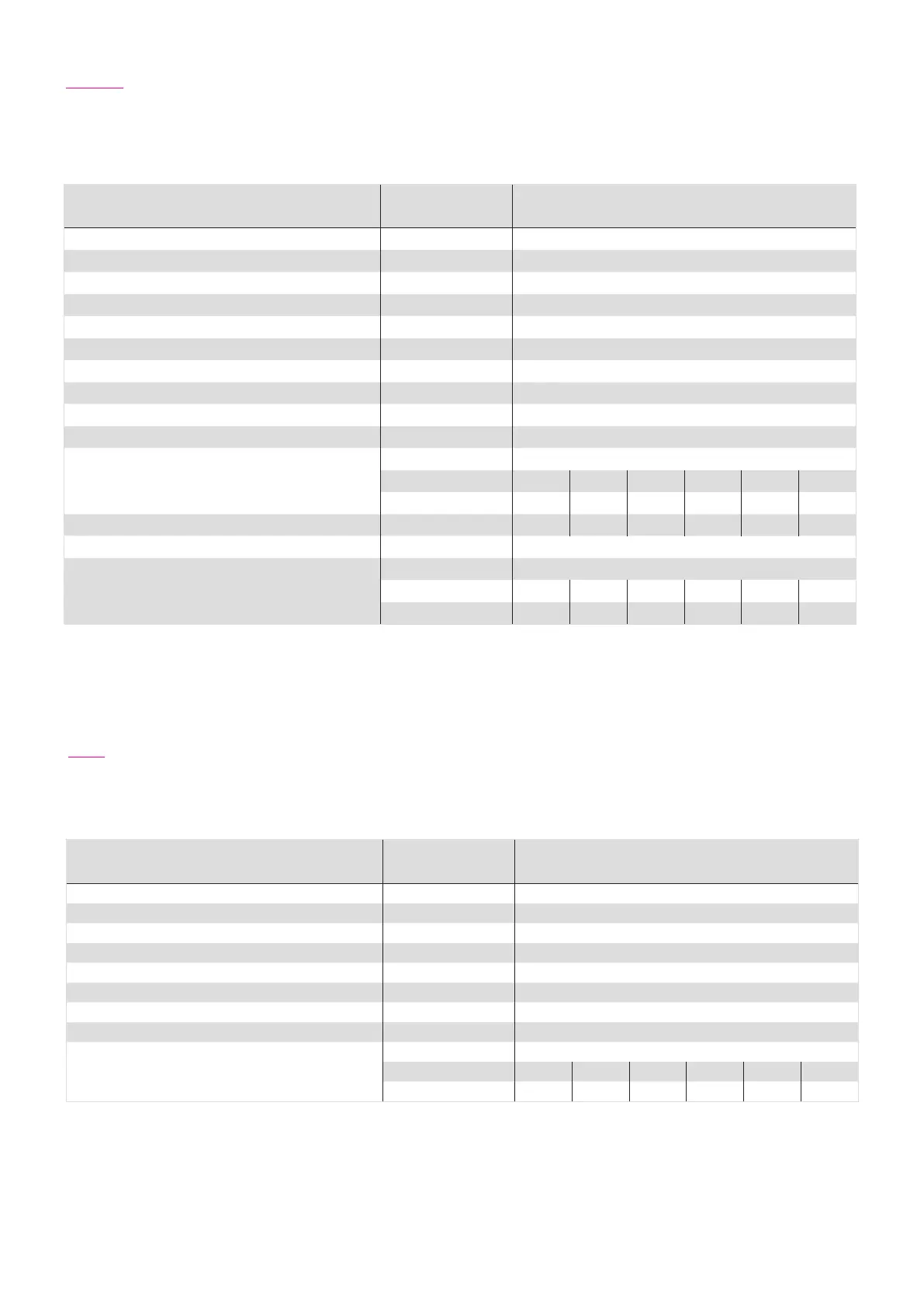
Multi-turn absolute motor feedback system with incremental
SIN / COS signals and EnDat data interface
Table 54.1
Ordering code Symbol [Unit] M512P
Manufacturer's designation EQN 1125
Protocol EnDat 2.2
Power supply
1)
U
b
[VDC] 3.6 … 14
Current consumption (typically @ 5 VDC, without load)
1)
I [mA] 105
Incremental signals u
pp
[V
ss
] 0.8 … 1.2
Signal form sinusoidal
Number of pulses n
1
[SIN / COS] 512
Absolute position / revolution (motor side)
3)
8192
Number of revolutions 4096
Accuracy
1)
[arcsec] ± 60
Resolution of the absolute value (output side)
Gear ratio CHA
i [ ] 30 50 80 100 120 160
[arcsec] 5.3 3.2 2.0 1.6 1.4 1.0
Number of revolutions (at output side) 136 81 51 40 34 25
Incremental resolution (motor side)
2)
inc [ ] 131072
Resolution (output side)
2)
Gear ratio CHA
i [ ] 30 50 80 100 120 160
[arcsec] 0.33 0.20 0.12 0.10 0.08 0.06
1)
Source: Manufacturer
2)
for interpolation with 8 bit
3)
increasing position values
- for redation in clockwise direction, looking at the motor shaft
- for redation in counter clockwise direction, looking at the output flange
RES
Resolver
Table 54.2
Ordering code Symbol [Unit] RES
Manufacturer's designation RE
Power supply
1)
U
b
[VAC] 7
Current consumption (max., without Last)
1)
I [mA] 50
Input frequency f [kHz] 5 … 10
Number of pole pairs, Transmission ratio 1
Transformation ratio
1)
ü [ ] 0.5 ±10%
Accuracy
1)
[arcmin] ± 10
Incremental resolution (motor side)
2)
[inc] 2048
Resolution (output side)
2)
Gear ratio CHA
i [ ] 30 50 80 100 120 160
[arcsec] 22 13 8 7 6 4
1)
Source: Manufacturer
2)
for interpolation with 8 bit
3)
increasing position values
- for rotation in clockwise direction, looking at the motor shaft
- for rotation in counter clockwise direction, looking at the output flange