-79-
Introduction
The following table lists the performance indicators:
Item Specications
Communication protocol EtherCAT
Service supported CoE (PDO
,
SDO)
Minimum synchronization period of
6-axis cam
2000 us
Synchronization mode The servo uses a DC-distributed clock. I/O uses I/O synchronization.
Physical layer 100BASE-TX
Baud rate 100 Mbit/s (100Base-TX)
Duplex mode Full duplex
Topological structure Cyclic topological structure
Transmission medium Network cable
Transmission distance Less than 100 M between two nodes
Number of slaves 65535
EtherCAT frame length 44 bytes to 1498 bytes
Process data A single Ethernet frame contains a maximum of 1486 bytes.
Synchronization jitter of two slaves < 1 μs
Refresh time
1000 digital inputs and outputs: approximately 30 us; 32 servo axes:
approximately 100 us
2 Wiring
■
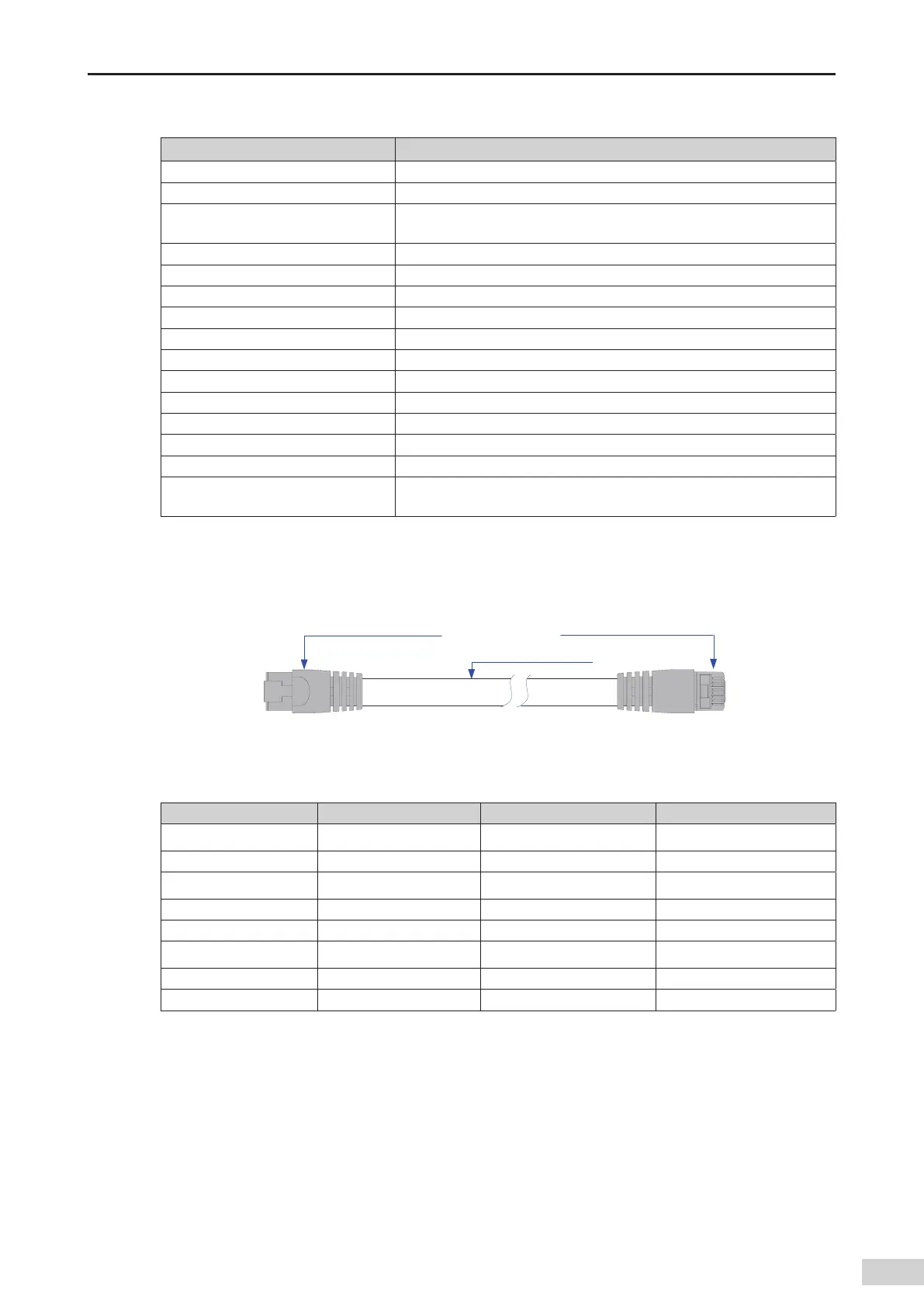
Making network cables
"8($BUFTIJFMEFE
UXJTUFEQBJSDBCMF
$BCMFDPOOFDUPS3+
DPOOFDUPS1$9
$BCMFDPOOFDUPS3+
DPOOFDUPS1$9
Figure 5-20 EtherCAT network cable requirements
■
Signal lead arrangement
Pin Signal Signal Direction Signal Description
1 TD+ Output Data transmission +
2 TD- Output Data transmission -
3 RD+ Input Data reception +
4 -- -- Not in use
5 -- -- Not in use
6 RD- Input Data reception -
7 -- -- Not in use
8 -- -- Not in use
■
Length requirement
The FastEthernet technology has proved that the cable length between devices cannot exceed
100 m when the EtherCAT bus is used. Otherwise
,
signal attenuation occurs
,
adversely aecting
communication.
 Loading...
Loading...




