6 Parameter Table
6
- 88 -
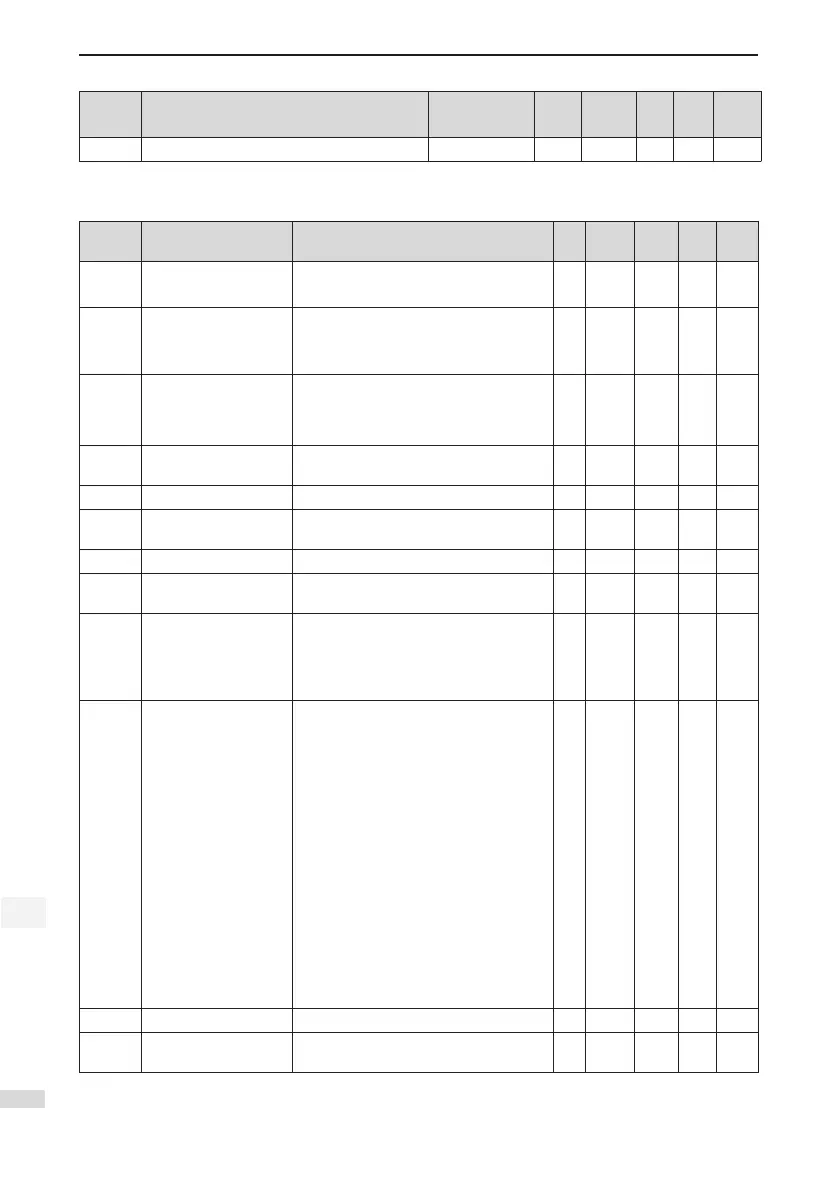
Function
Code
Parameter Name Setting Range Unit Default
ET Pro
CM
H0B-85 Rotating load single-turn position - Enc 0
- Dp
ALL
Group H0C: Communication Parameters
Function
Code
Parameter Name Setting Range Unit Default
ET Pro
CM
H0C-00 Servo axis address
0: Broadcast address
1 to 247
- 1
Im Ru
PST
H0C-02 Serial baud rate
0: 2400 Kbps; 1: 4800 Kbps
2: 9600 Kbps; 3: 19200 Kbps
4: 38400 Kbps; 5: 57600 Kbps
- 5
Im Ru
PST
H0C-03 Modbus data format
0: No check, 2 stop bits
1: Even parity check, 1 stop bit
2: Odd parity check, 1 stop bit
3: No check, 1 stop bit
- 0
Im Ru
PST
H0C-08
CAN communication
rate
0: 20 K; 1: 50 K; 2: 100 K; 3: 125 K; 4: 250
K; 5: 500 K; 6: 1 M; 7: 1 M
- 5
Im Ru
PST
H0C-09 Communication VDI 0: Disabled; 1: Enabled - 0
Im St
PST
H0C-10
VDI default value after
power-on
Bit0: VDI1 default value
…… Bit15: VDI16 default value
- 0
Po Ru
PST
H0C-11 Communication VDO 0: Disabled; 1: Enabled - 0
Im St
PST
H0C-12
Default level of VDO
allocated with function 0
Bit0: VDO1 default value
……Bit15: VDO16 default value
- 0
Im St
PST
H0C-13
Update function code
values written via
communication to
EEPROM
0: Not update the function codes written via
communication to EEPROM
1: Update the function codes written via
communication, except groups H0B and
H0D to EEPROM
- 1
Im Ru
PST
H0C-14 Modbus error code
New protocol:
0x0001: Illegal command code
0x0002: Illegal data address
0x0003: Illegal data
0x0004: Slave device fault
Old protocol:
0x0002: Command code not being
0x03/0x06/0x10
0x0004: CRC checksum received
and calculated by servo different from
checksum in data frame
0x0008: Accessed function code not exist
0x0010: Written function code value
exceed limits
0x0080: Written function code modiable
only in stop state but servo being in running
state
1 -
- Dp
-
H0C-25 Modbus response delay 0 to 5000 ms 1
Im Ru
PST
H0C-26
Modbus communication
data sequence
0: High 16 bits before low 16 bits
1: Low 16 bits before high 16 bits
1 1
Im Ru
PST

 Loading...
Loading...
