Electrical
336521 33
4.2.3 Remote Sensing - RECOMMENDED
Remote sensing is recommended. Remote sensing can accurately control motherboard
loads by adding it to the PSU connector. The +3.3 VDC output should have provisions
for remote sensing to compensate for excessive cable drops. In low power PSU,
remote sensing is recommended. The default sense should be connected to pin 13 of
the main power connector. Refer Figure 5-2
. The power supply should draw no more
than 10 mA through the remote sense line to keep DC offset voltages to a minimum.
4.2.4 Other Low Power System Requirements
To help meet multiple world-wide Energy Regulations the +5VSB standby rail must
meet the following efficiency as shown in Table 4-5
which is measured with the main
outputs off (PS_ON# high state). These World-Wide Energy Regulations and
standards include: Blue Angel* system requirements, RAL-UZ 78, US Presidential
executive order 13221, ENERGY STAR*, ErP Lot 6 requirements (2010 and 2013
levels), and 2014 ErP Lot 3 requirements. Additionally, if any Computers use an
Alternative Low Power Mode (ALPM) then the +5VSB standby efficiency has similar
requirements as shown below.
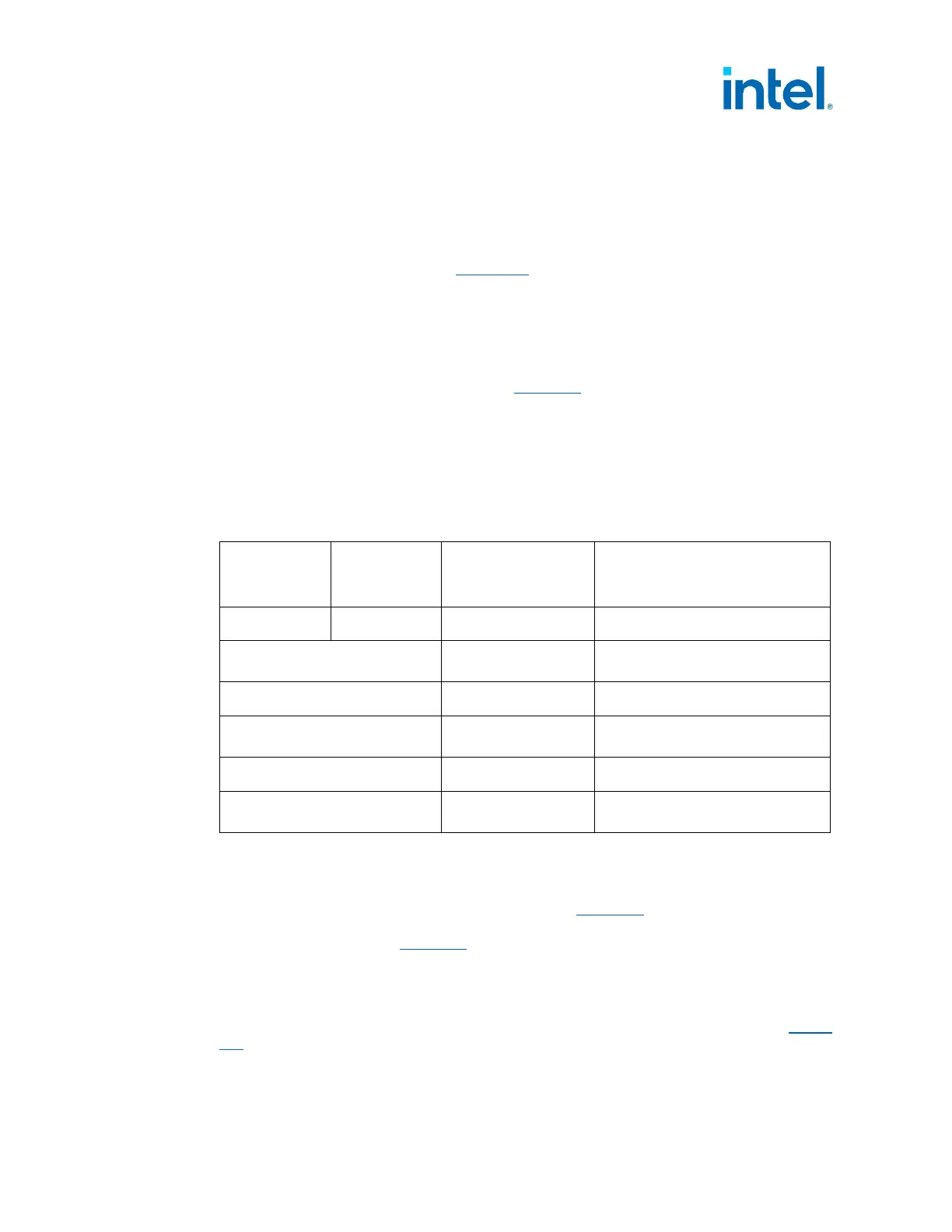
Table 4-5: Recommended Standby Rail DC and AC Power Efficiency
5VSB
Load Target
5VSB
Actual Load
Efficiency Target
(both 115V and
230V input)
Remark
Max / Label 3.0A / Label 75% Recommend
1.5 A 75%
REQUIRED
ALPM and ErP Lot 3 2014
1.00 A 75% Recommend
0.55 A 75%
REQUIRED
ALPM and ErP* Lot 3 2014
90 mA 55% Recommend
45 mA 45%
REQUIRED
ErP* Lot 6 2013
4.2.5 Output Ripple Noise - REQUIRED
The output ripple and noise requirements listed in Table 4-6 shall be met throughout
the load ranges specified for the appropriate form factor and under all input voltage
conditions as specified in Table 4-1.
Ripple and noise are defined as periodic or random signals over a frequency band of
10 Hz to 20 MHz. Measurements shall be made with an oscilloscope with 20 MHz of
bandwidth. Outputs should be bypassed at the connector with a 0.1μF ceramic disk
capacitor and a 10 μF electrolytic capacitor to simulate system loading. Refer to
Figure
4-1 for the differential noise measurement setup.