Table 4-1 - KTY84/130 Temperature Sensor Characteristics
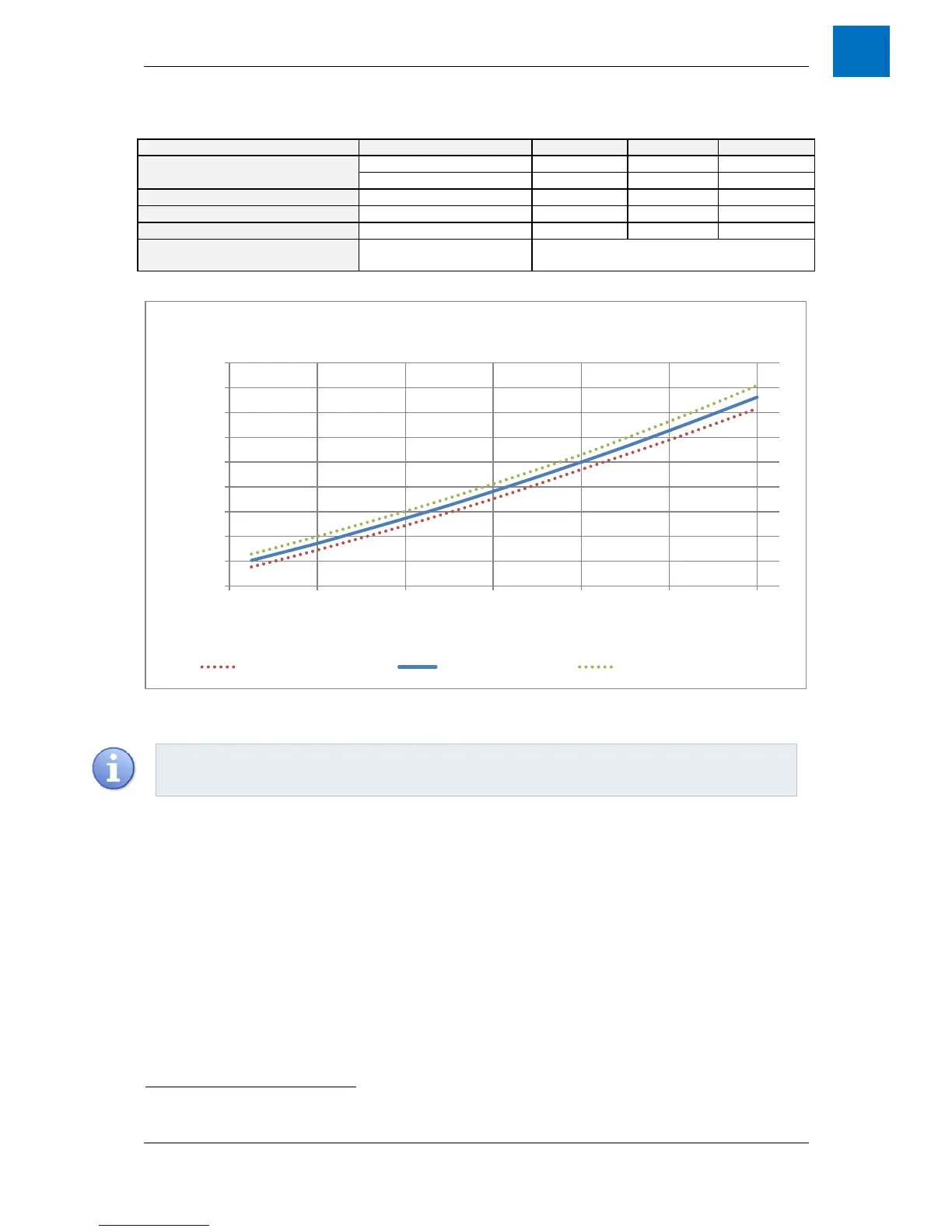
Figure 4-5 – KTY84/130 Temperature Sensor Characteristics
NOTE: The temperature sensor polarity is important to the correct operation of the temperature sensor.
Incorrect wiring can result in incorrect motor temperature readings. Refer to 5.3.3 Connector for wiring
information.
Operating Environment 4.7
The temperature of the operating environment is critical when determining the appropriate motor model to use.
When the motor is producing force, it will produce a temperature rise above ambient as described in 5
Specificationswill
become under the same duty cycle. The motor will also be subject to a temperature related reduction in the force
produced.
Therefore, it is important that the motor cooling method is carefully considered. If air cooling is used, ensure that
the motor is well ventilated to limit localized heating. If the motor is liquid cooled, ensure that the coolant and flow
rates are sufficient to maintain the motor temperature within operating limits.
It is recommended that the inbuilt Temperature Sensor is monitored to prevent the motor exceeding absolute
temperature limits.
500
600
700
800
900
1000
1100
1200
1300
1400
20 40 60 80 100 120 140
Resistance (Ω)
Ambient Temperature (°C)
Resistance (2mA Continuous Sensor Current)
Resistance (Minimum) Resistance (Typical) Resistance (Maximum)