24
Parameter conguration
ServoOne User Manual SERCOS II and III
ID no.: 1108.26B.3-00 Date: 04/2020
Parameter conguration
All SERCOS III-specic parameters are saved in the ServoOne parameter set from
KEBA parameter number 11000 or 20000.
6.2.2 Manufacturer-specic parameters Pxxxx
All manufacturer-specic parameters are to be found with an offset of 8000(hex) on the
KEBA parameter number in the list S-0-1017.0.0.
E.g. the KEBA parameter no. 107 (function selector ISD06) can be found in the list
of all available parameters (S-0-1017.0.0) with the number 32875. This parameter is
addressed using its KEBA parameter number, that is in this case P-0107.
Because the device-specic parameters also contain eld parameters that are not
known to the SERCOS prole, it is always possible to address the rst parameter in a
eld using the parameter number; this statement applies both to the service channel
and the MDT and AT.
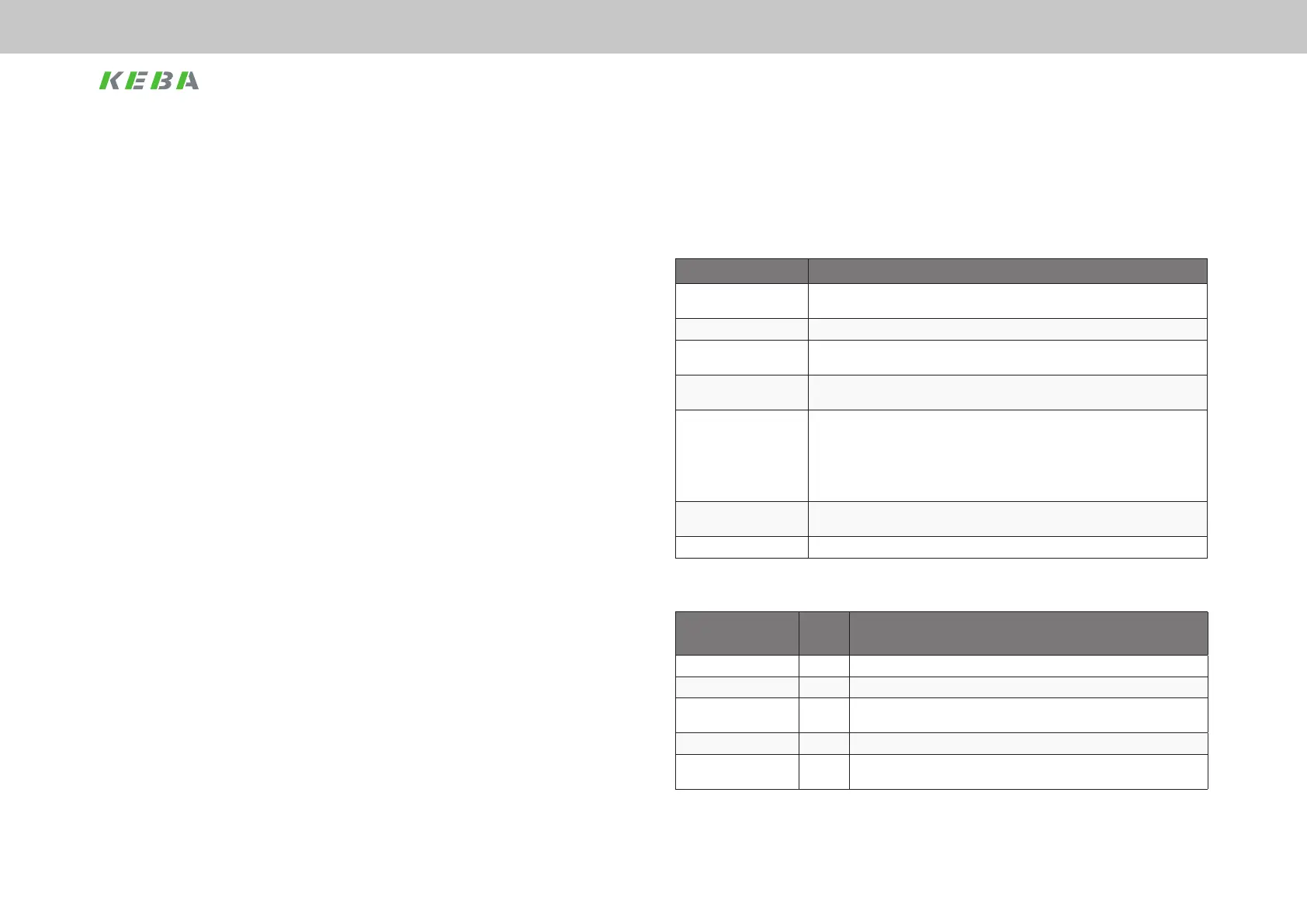
6.3 Operation modes
The operation modes that, according to the SERCOS specication, can be selected in
the master control word and that are indicated in the drive status word are coded using
the scheme in the following table.
Bit Explanation
15 0: SERCOS default operation mode
1: Manufacturer-specic operation mode
14 - 10 Reserved
9 0: Without axis control word (S-0-0520.0.0)
1: With axis control word (S-0-0520.0.0) (not supported)
8 0: Without transition
1: With transition
7 - 4 Expanded operation mode
0000: No expanded operation mode
0001: Interpolation
0010: Positioning
0011: Block mode (not supported)
0100: Synchronous operation mode (not supported)
3 0: With tracking error
1: Without tracking error
2 - 0 Operation mode
Table 6.1 Operation mode coding
The operation modes supported by the ServoOne are listed in parameter S-0-0292.
Operation mode
Bit 15 ..... ..... Bit 0
HEX Description
0000 0000 0000 0000 0x0000 No operation mode
0000 0000 0000 0001 0x0001 Torque control
0000 0000 0000 0010 0x0002 Speed control, drive-controlled prole generation with ramps congured in the
parameters
0000 0000 0100 0010 0x0004 Speed control, controller-controlled prole generation, no tracking error
0000 0000 0000 0011 0x0003 Position control with position encoder 1 (e.g. motor encoder), controller-con-
trolled prole generation, feed forward signals not used, with tracking error
Table 6.2 Operation modes supported
 Loading...
Loading...

