30
Parameter conguration
ServoOne User Manual SERCOS II and III
ID no.: 1108.26B.3-00 Date: 04/2020
Parameter conguration
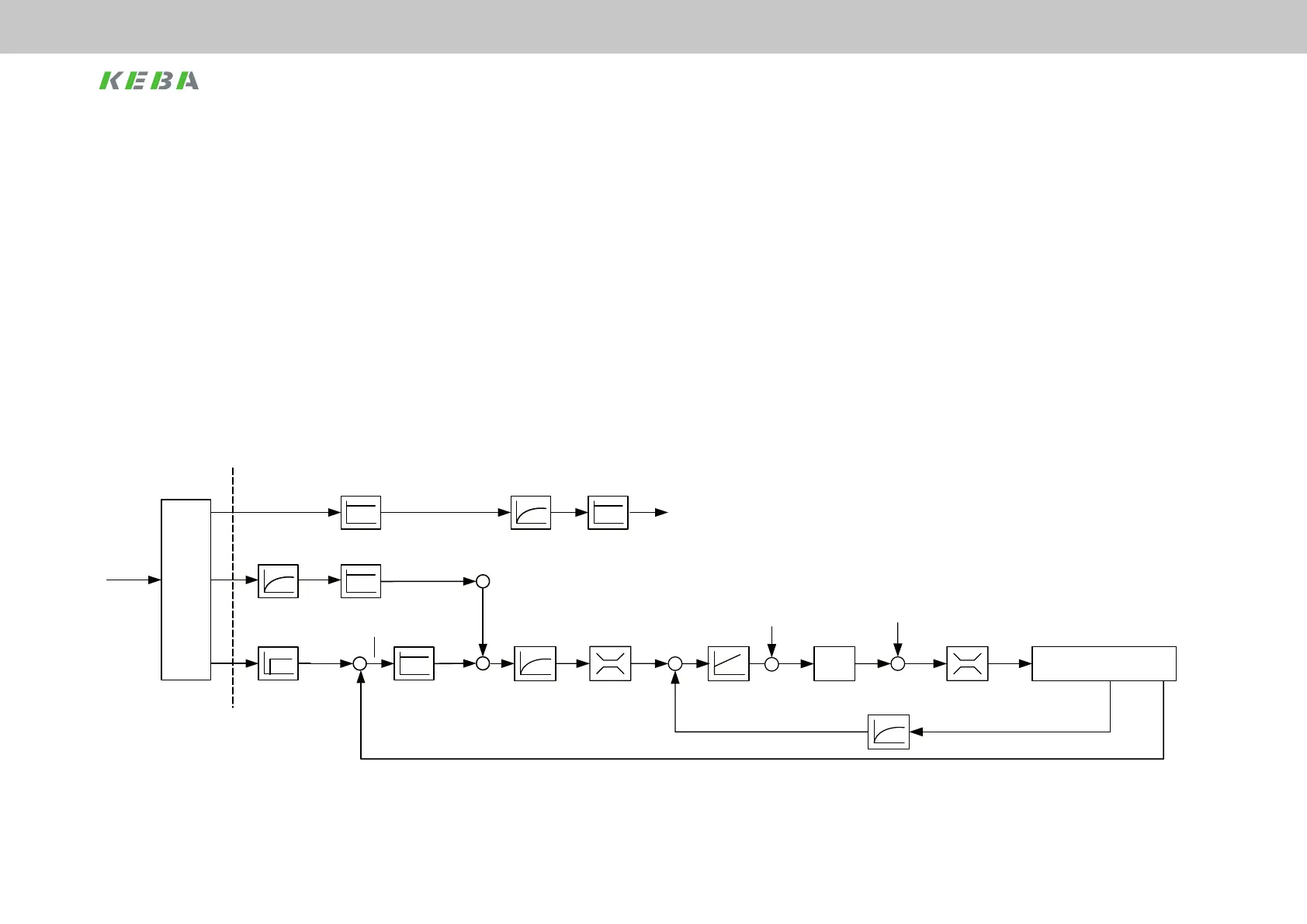
6.3.4 Position control without tracking error
Drive-internal generation of the feed forward control signals
In this operation mode the master cyclically species position reference values. The
drive undertakes ne interpolation between the position reference values and calculates
the speed and acceleration feed forward control signals. The position reference value
can be delayed by the number of position controller cycles set in parameter P0558.
The amplitudes of the feed forward control signals can be scaled via the parameter
S-0-0296 (Velocity feed forward gain) or S-0-0348 (Acceleration feed forward gain).
The speed feed forward control is smoothed via a P-T1 element using the lter time
constant P0555 and superimposed on the speed reference value generated by the
position controller. The acceleration feed forward control signal is converted into a
torque feed forward control signal via the moment of inertia of the drive that is set in
parameter P0314; this signal is superimposed on the torque reference value generated
by the speed controller.
Figure 6.4
p
ref
-
Interpolation
0-0047
n
refFF
m
refFF
P0372
P0554
P0374
S-0-0051
S-0-0053
P0414
P1516
G(s)
-
P 0371
S-0-0100
S-0-0101
S-0-0040
S-0-0156
Torque controlled motor
P 0351
S-0-0081P 0325
P 0326
P 0327
P 0329
P 0330
P 0331
P 0332
P 0460
P0458
P0328
P0333
P0334
P0167
P 0320
P 0321
alternative
S-0-0322
GnFF(s)
Gru(s)
GmFF(s)
P 0378
S-0-0104
alternative
S-0-0360
S-0-0296
alternative
S-0-0375
S-0-0348
alternative
S-0-0376
Block diagram of position control without tracking error with internal feed forward
control signals
 Loading...
Loading...

