62
Error messages and diagnostics
ServoOne User Manual SERCOS II and III
ID no.: 1108.26B.3-00 Date: 04/2020
Error messages and diagnostics
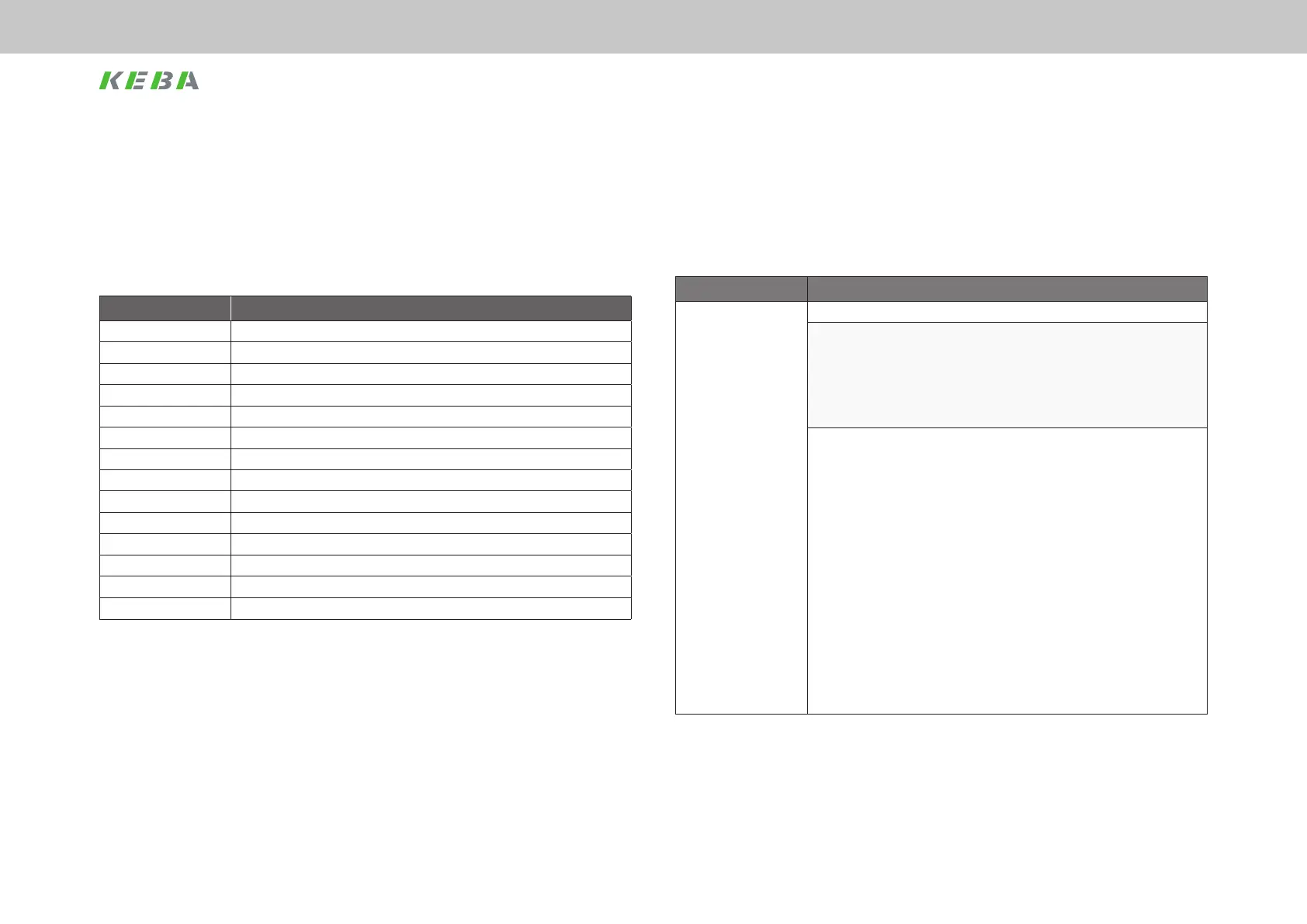
10.1.2 Warning messages in the state class 2 (C2D)
Warning messages are displayed with the aid of the standard parameter S-0-0012
(state class 2).
The drive signals the warning by setting bit 12 in the drive status word (see chapter
5.2.4).
The following warnings are dened in the state class 2:
Bit no. Warning
15 Manufacturer-specic warning
14 Reserved
13 Target position outside the positioning range
12 Communication warning
11 Excessive speed error
10 Reserved
9 Warning undervoltage bus
8 – 6 Reserved
5 Positioning speed > nLimit
4 Reserved
3 Warning cooling error
2 Warning overtemperature motor
1 Warning overtemperature amplier
0 Warning overload
Table 10.2 State class 2
Bit = 0 warning not active, bit = 1 warning active.
10.1.3 Status messages (only SERCOS II)
The most important status messages from the drive are displayed in parameter S-0-
0013
(state class 3). The status messages in square brackets are dened in the SERCOS
specication, but are not supported by the ServoOne.
Parameter Description
S-0-0013
Class 3 diagnostic (C3D)
Messages in the operating states
If the state of a drive changes, then the related bit in C3D is changed accordingly and
the change bit for C3D (bit 11) in the drive status is set to "1". The change bit for C3D
in the drive status is cleared to "0" again by reading C3D via the service channel. The
action of the operating state messages on the change bit in the drive status can be
eliminated in the mask for C3D (S-0-0098).
The bits dened in C3D are also dened by the parameter numbers given in brackets.
Structure of parameter C3D:
Bit 0: nactual = nref (see S-0-0330)
Bit 1: nactual = 0 (see S-0-0331)
Bit 2: |nactual| < |nx| (see S-0-0332)
Bit 3: |T| > | |Tx| (see S-0-0333)
[Bit 4: |T| > | |Tlimit| (see S-0-0334)]
Bit 5: |nref| > |n limit| (see S-0-0335)
Bit 6: Target position reached (see S-0-0336)
[Bit 7: |P | > |Px| (see S-0-0337)]
[Bit 8: Position actual value = Active target position
|(S-0-0430 – S-0-0051/0053)| < S-0-0057 (see S-0-0338)]
[Bit 9: |nfeedback| < Minimum spindle speed (see S-0-0339)]
[Bit 10: |nfeedback| > Maximum spindle speed (see S-0-0340)]
[Bit 11: Pre-position reached (see S-0-0341, S-0-0261)]
[Bit 12: Position reference value = Target position (see S-0-0342)]
[Bit 13: Positioning process interrupted (see S-0-0343)]
[Bit 14: Reserved]
[Bit 15: Manufacturer-specic status message set (see S-0-0182)]
Bit = 0 Status not active
Bit = 1 Status active
Table 10.3 Structure of parameter S-0-0013 (state class 3)
 Loading...
Loading...

