EM2RS Modbus RS485 Stepper Drive User Manual
(means path 1);
(2) The data type of parameter is 32bit, which include high 16bit register and low 16bit register.usually , we use low 16bits only,
but it needs to take the high 16 bits as beginning when we read/write multiple parameters continuously.
4.3 Modbus & PR Parameters
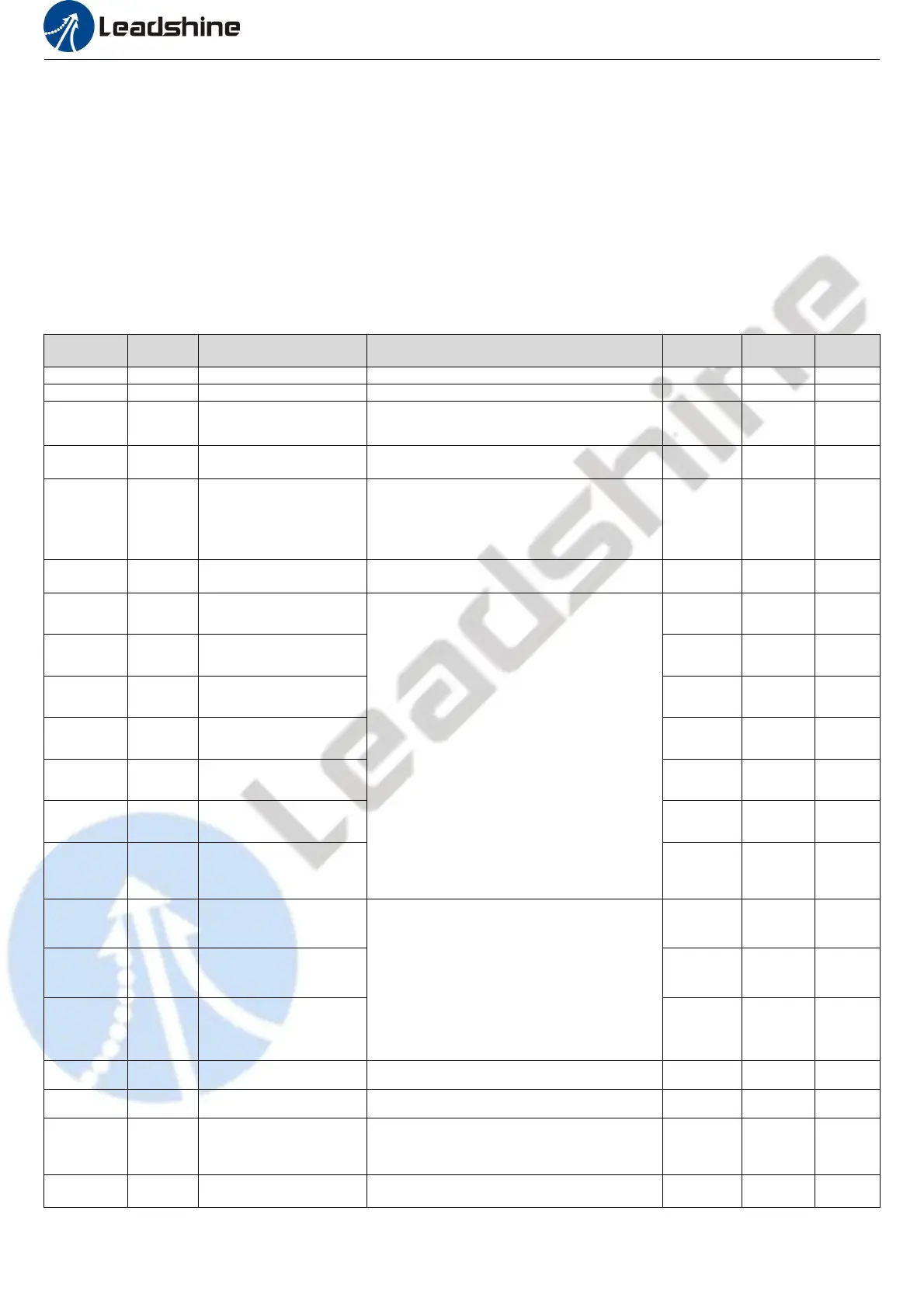
4.3.1 Basic Parameters
Leadshine RS485 parameter data type is 32 bits, a parameter contains two registers of high 16 bits and low 16 bits, only the
lower 16 bits are used in practice. However, when reading or writing multiple parameters in succession, the high 16 bits of the
parameter need to be used as the start, usually 00.
Forced enable by software
Software forced enable has a higher priority than
IO enable, and when this value is 0, the enable
status of the drive only depends on the IO signal.
When this value is 1, the motor is enabled
regardless of the IO signal status.
To configure the time for internal command
filtering
Default is normal-open (N.O) type, it can be set
to normal-closed (N.C) type by setting the
corresponding port +0x80
SI1 is enable(default), N.C type input.
0: invalid; 7: alarm clearing;
8: enable (also can be set by 0x00F);
0x20: Trigger command (CTRG);
0x21: Trigger homing;
0x22: EMG (quick stop);
0x23: JOG+;
0x24: JOG-;
0x25: POT (positive limit);
0x26: NOT (negative limit);
0x27: ORG (home switch);
0x28: ADD0 (path address 0);
0x29: ADD1 (path address 1);
0x2A: ADD2 (path address 2);
0x2B: ADD3 (path address 3);
0x2C: JOG velocity 2
Default is normal-open(N.O) type, it can be set to
normal-closed(N.C) type by setting the
corresponding port +0x80
0: invalid;
0x20: command completed;
0x21: path completed;
0x22: homing completed;
0x23: in-position completed;
0x24: brake output;
0x25: alarm output;
Threshold value of brake
locking velocity
Alarm detection selection
Bit setting:
=1: Yes; =0: No