EM2RS Modbus RS485 Stepper Drive User Manual
Write corresponding command to the 0x6002 to realize the selection
and startup of each action.
Write value 0x01P----P-segment positioning, (P indicates path #0-15);
Write value 0x020---- Homing; (edge triggered)
Write value 0x021---- Set the current position as origin by manual;
Write value 0x040---- E-stop;
Read value 0x000---- Positioning is completed and new data can be
received;
Read value 0x01P, 0x020, 0x040---- Not responding to the command;
Read value 0x10P---- Path is running;
Read value 0x200---- Command is completed and waiting for
positioning.
Note: (P indicates path NO. 0-15);
5.5.4 Immediate Trigger
The immediate trigger method means that each time the current path 0(PR0) is written, the run of PR0 is triggered in real time.
The position & velocity& homing and so on are achieved through one data frame. This method uses PR0 to implement, which
has 8 data, the last parameter Pr9.07 is mapped to Pr8.02, writing value 0x10 to it will trigger PR0 motion immediately, thus
realizing the immediate trigger operation.
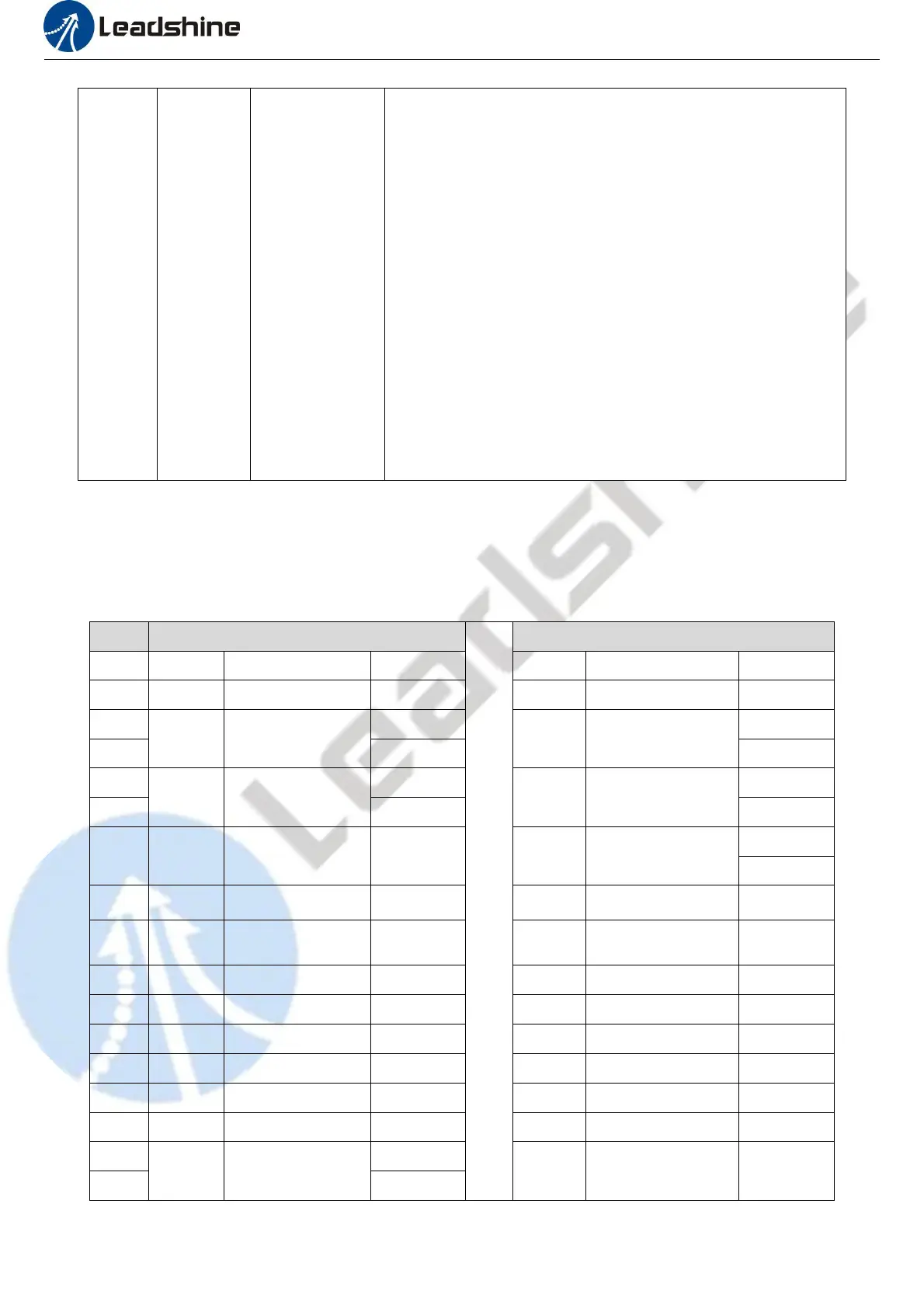
Sending message (Master->Slave)
Return message (Slave->Master)
Actually written
Number of