EM2RS Modbus RS485 Stepper Drive User Manual
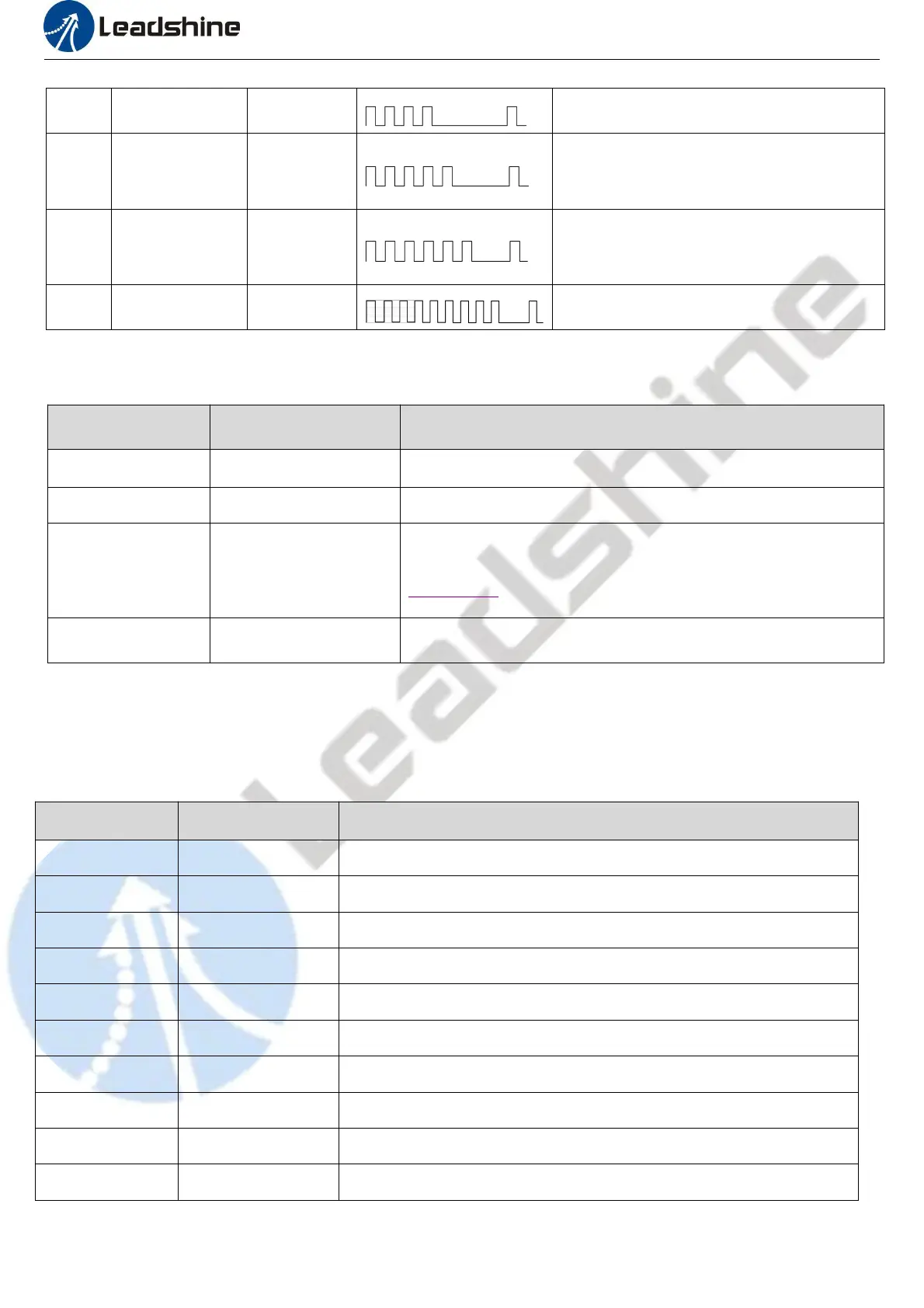
1. Check whether the motor wire is broken
1. Connect the drive to Leadshine software to
reset parameters to the factory
2. If it still exists, the hardware failure
1. Restart the drive;
2. If it still exists, disable auto-tuning by
0x01AB (Pr5.13).
Repeated settings
of input function
4.4.3 Error Clear
Check the error via Leadshine MotionStudio
Over current,over voltage,etc
Over current,over voltage,etc
Check the Historical happened error .
(1) It can clear over voltage error, but can not clear over current error;
(2) There are two methods to clear the current alarm: one is via
Leadshine MotionStudio, and the second is via external I/O,refer to
Section 4.3.2.
(3) If the current error cannot be cleared, please check the drive
All history error records can be cleared by Leadshine MotionStudio
4.5 Register Mapping Continuous Read/Write Function
Address description 0x0F10-0x0F19. By writing the "address to be mapped" to 0x0F10-0x0F19, it is possible to set the address
mapping. The 10 consecutive mapped addresses are available for mapping discontinuous parameter addresses.
Examples
Parameter original address
0x0001 (Pr0.00: Microstep)
0x0009 (Pr0.04: inductance value)
0x00A1 (Pr2.00: instruction filter time)
0x0191 (Pr5.00: peak current)
0x0167 (Pr4.19: delay of releasing brake)
0x0173 (Pr4.25: software de-jitter delay of position when in position)
0x0233 (Pr7.01: encoder resolution)
0x0243 (Pr7.09: over-voltage threshold)
0x602E (Pr8.46: digital inputs)
0x6203 (Pr9.03: PR0 velocity)
At this point, the mapping of the 10 parameter addresses to the mapped area is complete, and the mapped addresses can be used