Selection aid
15-16
48XX/49XXSHB0399
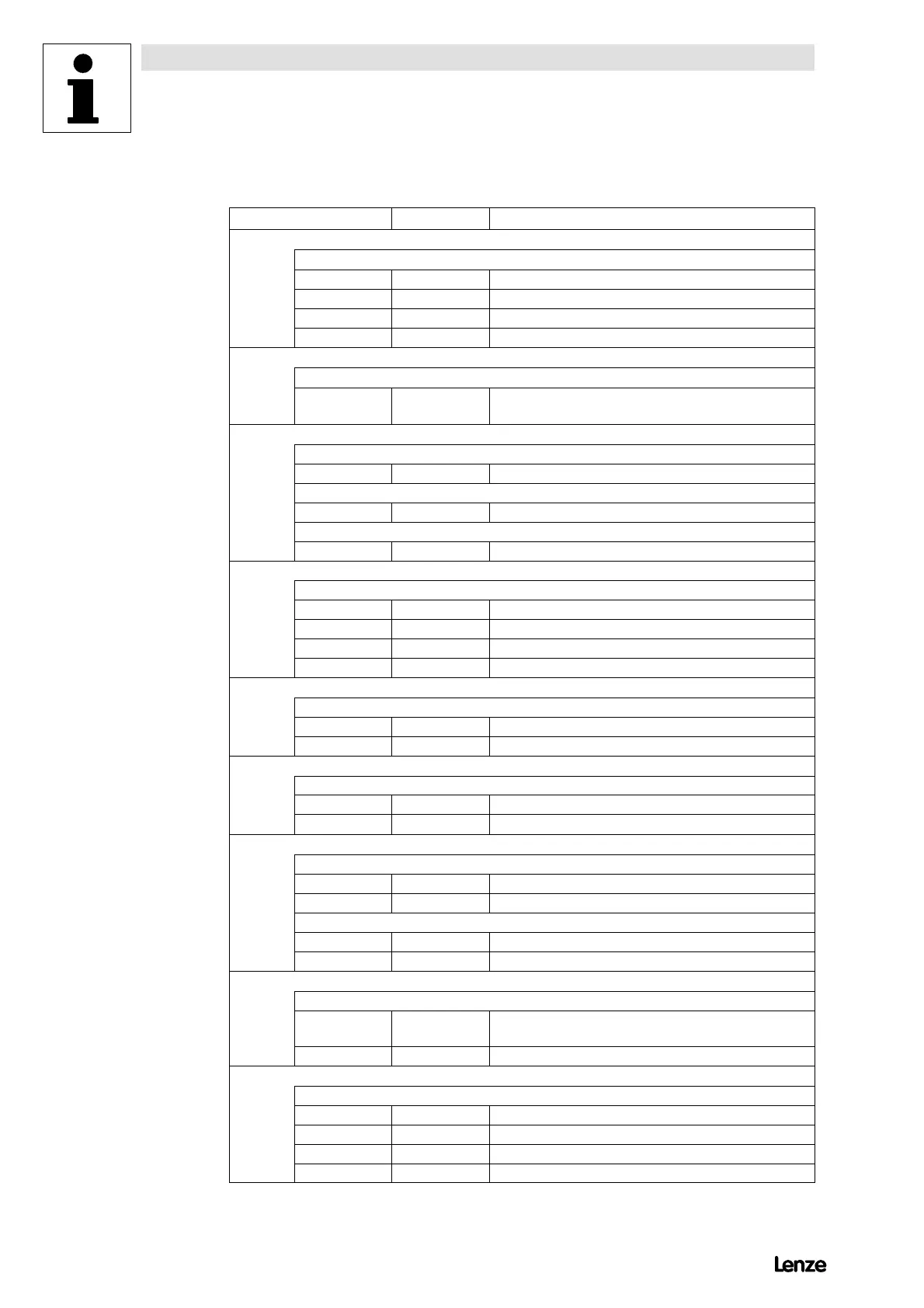
Parameter setting
Code Input Description
Input according to motor nameplate
Master and slave
C083 xxx A Rated field current
C084 xxx ms Armature-time constant
C088 xxx A Rated motor current
C090 xxx V Rated motor voltage
Input of current limits
Master and slave
C022, C023 xxx A Maximum motor current
Enter controller configuration
Master and slave
C000 -2- Extended code set
Master
C005 -52- Speed control with resolver
Slave
C005 -72- Set-value cascade with resolver
Freely assignable digital inputs
Slave
C112 -4- Input selection E4
C113 -17- Motor potentiometer down
C112 -5- Input selection E5
C113 -18- Motor potentiometer up
Freely assignable analog inputs
Slave
C145 -8- Input selection motor potentiometer output
C146 -10- Gain C027 of X5
Freely assignable digital outputs
Master and slave
C116 -5- Input selection A5
C117 -15- I
A
>I
AX
Gearbox factor
Master (FIG 15-8; i = 19.4)
C032 xxx Numerator = 1.9400
C033 xxx Denominator = 0.1000
Slave (FIG 15-8; i = 5.3)
C032 xxx Numerator = 0.5300
C033 xxx Denominator = 0.1000
Stretch factor
Slave
C027 xxx Numerator = 1.6 (Streching unit 1);
Numerator = 1.375 (Streching unit 2)
C028 xxx Denominator = 1
Motor potentiometer parameter setting
Slave
C260 100% Motor potentiometer upper limit
C261 -100% Motor potentiometer lower limit
C262 xxx s Motor potentiometer acceleration time
C263 xxx s Motor potentiometer deceleration time