Appendix
Code table
14
385
EDBCSXA064 EN 3.2
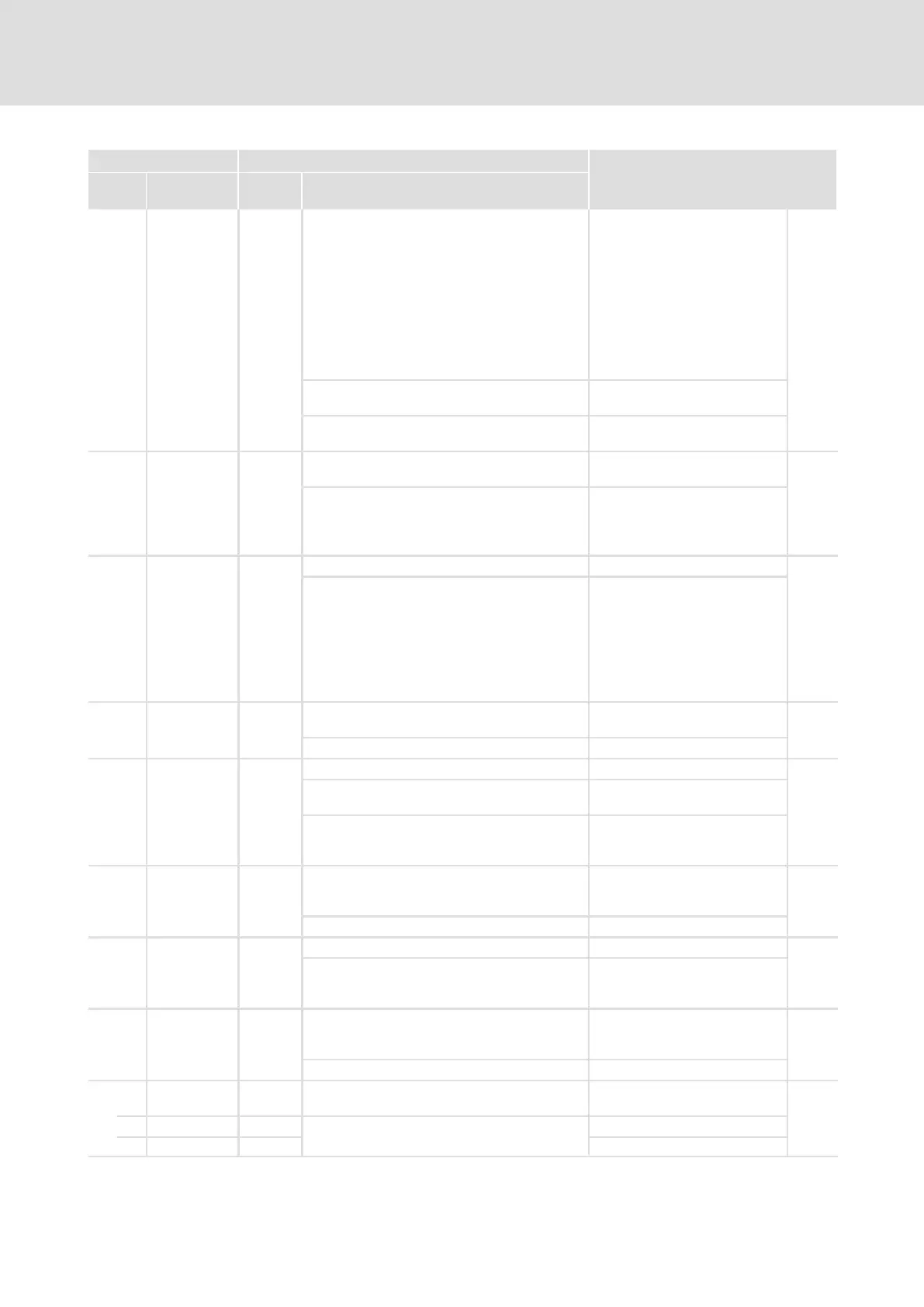
IMPORTANTPossible settingsCode
SelectionLenze/
{Appl.}
DesignationNo.
[C0006] Op mode 1
Operating mode of the motor
control
l If the master pulse (via
MCTRL: C0911 = 0 or DfIn:
C0428 = 0) is used, the
voltage supply has to be
switched off and then on
again when the operating
mode is changed.
l Otherwise, the master pulses
will not be recognised.
1 Servo PM−SM Servo control of synchronous
motors
2 Servo ASM Servo control of asynchronous
motors
C0009 LECOM
address
1
Entry of the device address for
operation via AIF interface X1
1 {1} 99 Communication modules on AIF
interface X1:
l LECOM−A/B/LI 2102
l PROFIBUS−DP 2133
C0011 Nmax 3000
Maximum speed
357
500 {1 rpm} 16000 Reference value for the absolute
and relative setpoint selection
for the acceleration and
deceleration times.
For parameter setting via
interface: greater changes in one
step should only be made when
the controller is inhibited (CINH)!
C0017 FCODE (Qmin) 50
Free code for using speed signals
(Speed signal FCODE_nC17_a)
347
−16000 {1 rpm} 16000
C0018 fchop 2
Switching frequency
1 4 kHz sin 4 kHz permanent PWM
frequency
2 8/4 kHz sin 8 kHz PWM frequency with
automatic derating to 4 kHz at
high load
C0019 Thresh nact =
0
0
Threshold when actual speed
value (n
act
) = 0 is detected.
(DCTRL_bNActEq0_b)
0 {1 rpm} 16000
C0022 Imax current à
I
max
limit
0 {0.01 A} à Device−dependent list
Max. current can be gathered
from the technical data.
C0023 Imax fld.weak 0
Maximum field weakening
current for synchronous
machines
0 {1 %} 100
C0026 Offset for relative analog signals
(AIN)
275
347
1 FCODE(offset) 0,0 −199,99 {0.01 %} 199,99 FCODE_nC26_1_a
2 FCODE(offset) 0,0 FCODE_nC26_2_a

 Loading...
Loading...




