Appendix
General information about the system bus (CAN)
Process data transfer
14
448
EDBCSXA064 EN 3.2
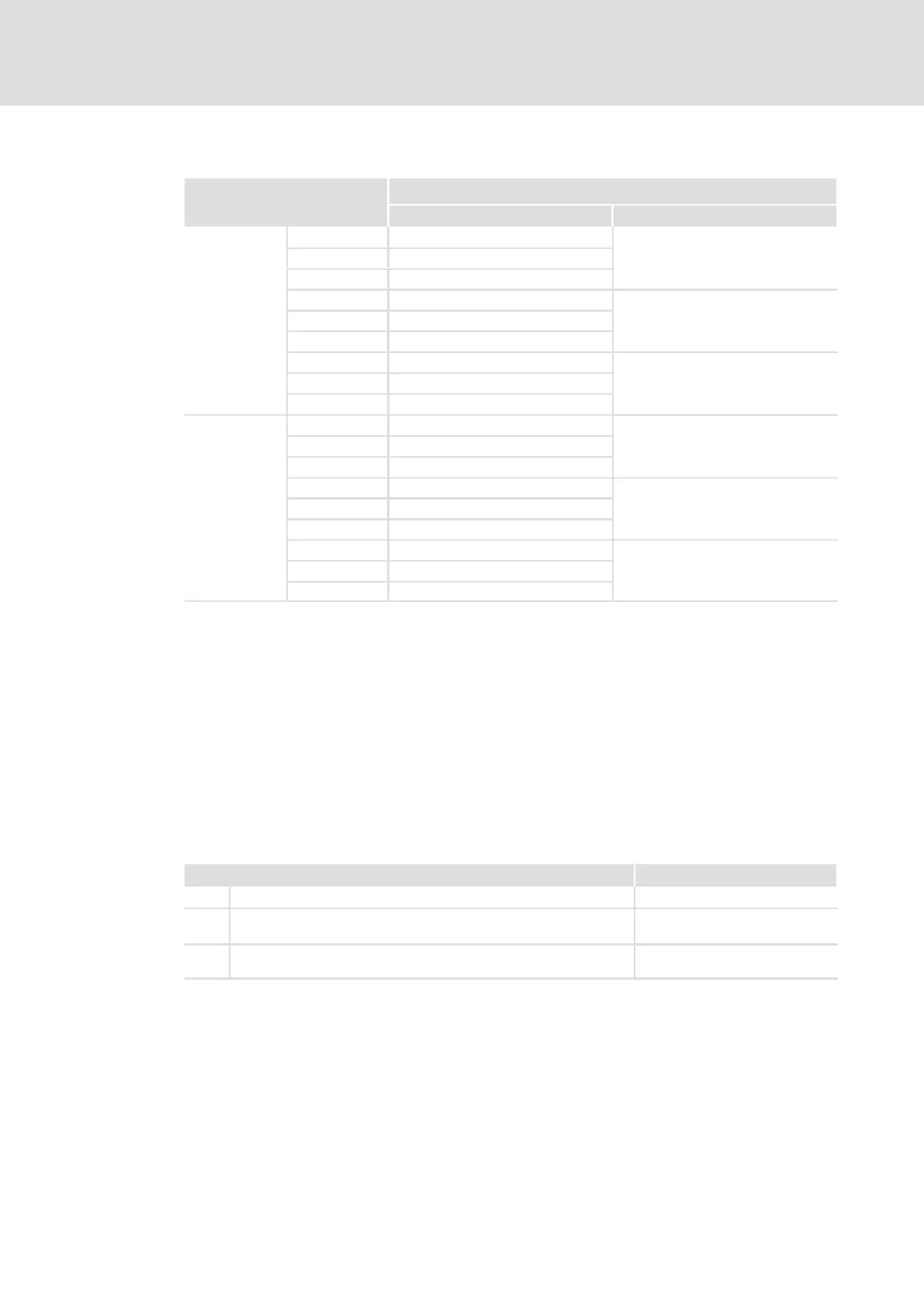
14.7.3.3 Transfer of the process data objects
Process data objects
Data transmission
ECSxE ECSxS/P/M/A
RPDOs
(to ECS module)
AIF1_IN
˘
cyclic (sync−controlled)
CAN1_IN
cyclic (sync−controlled)
CANaux1_IN
˘
AIF2_IN
˘
event−controlled/cyclic without sync
CAN2_IN
˘
CANaux2_IN
˘
AIF3_IN
˘
event−controlled/cyclic without sync
CAN3_IN
event−controlled/cyclic without sync
CANaux3_IN
˘
TPDOs
(from ECS module)
AIF1_OUT
˘
cyclic (sync−controlled)
CAN1_OUT
cyclic (sync−controlled)
CANaux1_OUT
˘
AIF2_OUT
˘
event−controlled/cyclic without sync
CAN2_OUT
˘
CANaux2_OUT
˘
AIF3_OUT
˘
event−controlled/cyclic without sync
CAN3_OUT
event−controlled/cyclic without sync
CANaux3_OUT
˘
ƒ Cyclic data transmission with sync telegram ( 450)
(via AIF1, CAN1, CANaux1)
The sync telegram enables the controller to accept the process data from the master
(RPDOs) or send them to the master (TPDOs).
ƒ Event−controlled data transmission
(via AIF2/3, CAN2/3, CANaux2/3)
The data will be transmitted if a value changes in the corresponding output object.
ƒ Cyclic data transmission without sync telegram
(via AIF2/3, CAN2/3, CANaux2/3)
The data is transmitted in fixed times. The cycle time can be set via the following codes:
Interface Code
X1 Automation interface (AIF) C2356
X4 ECSxS/P/M: MotionBus (CAN)
ECSxA/E: System bus (CAN)
C0356
X14 System bus (CAN)
l Interface is not available for ECSxE.
C2456
– Setting of cycle time > 0: data transmission with fixed cycle time
– Setting of cycle time = 0: event−controlled data transmission

 Loading...
Loading...




