16 Lenze 13466187 EDBTL03 v8 EN, DE, FR, IT, ES
Inbetriebnahme
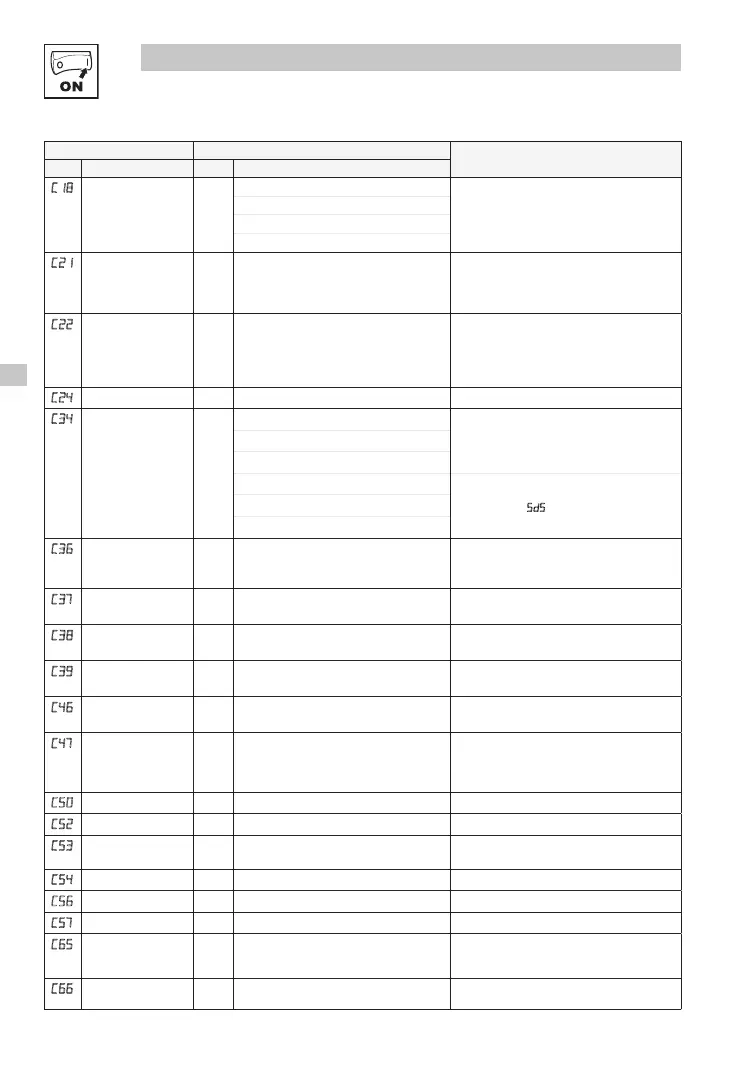
Code Mögliche Einstellungen
WICHTIG
Nr. Benennung Lenze Auswahl
C18
Schaltfrequenz 2 0 4 kHz • Höhere Schaltfrequenzen senken das
Motorengeräusch.
• Bemessung in Abschnitt 2.2 beachten
• C18 = 1, 2, 3: Automatische Bemessung
auf 4 kHz bei 1,2 x Ir
1 6 kHz
2 8 kHz
3 10 kHz
C21
Schlupfkom-
pensation
0,0 0,0 {%} 40,0
C21 ist im Vektorbetrieb nicht aktiv (siehe
C14).
C21 ändern, bis sich die Motordrehzahl
zwischen Leerlauf und maximaler Last nicht
mehr ändert
C22
Stromgrenze 200 30 {%} 200
Referenz: Nennausgangsstrom Tml
• Bei Erreichen des Grenzwerts nimmt
entweder die Hochlaufzeit zu oder die
Ausgangsfrequenz ab.
• Wenn c73 = 0, dann ist max. Einstellung
167 %
C24
Anhebung Hochlauf 0,0 0,0 {%} 20.0 Nur beim Hochlaufen aktiv
C34
Konguration-
Analogeingang
0
0 0...10 V
1 0...5 V
2 reserviert
3 0...20 mA
• Mit 250 Ω Widerstand zwischen den
Klemmen 7 und 8
• C34 = 5 löst 5d5-Fehler aus, wenn Signal
unter 2 mA abfällt
4 4...20 mA
5 4...20 mA (überwacht)
C36
Spannung -
Gleichstrombremse
(GSB)
4,0 0,0 {%} 50,0 • Siehe CE1…CE3 und c06
• Tauglichkeit des Motors für
Gleichstrombremsung überprüfen
C37
Fester Sollwert 1
(JOG 1)
20,0 0,0 {Hz} 240 Lenze-Einstellung: aktiv bei E1 = HIGH
C38
Fester Sollwert 2
(JOG 2)
30,0 0,0 {Hz} 240 Lenze-Einstellung: aktiv bei E2 = HIGH
C39
Fester Sollwert 3
(JOG 3)
40,0 0,0 {Hz} 240 Lenze-Einstellung: aktiv bei E1 = HIGH und
E2 = HIGH
C46
Frequenzsollwert
0,0 {Hz} 240 Anzeige: Sollwert über Analogeingang,
Funktion UP/DOWN
C47
Drehmom-
entsollwert/bereich
100 0 {%} 400 • Wenn C14 = 5 und C01 = 1, 3, 5, 7 oder 11,
den Drehmomentsollwert festlegen
• Wenn C14 = 5 und C01 = 0, 2, 4, oder 6,
den Drehmomentbereich für C34 festlegen
C50
Ausgangsfrequenz 0,0 {Hz} 240 Anzeige
C52
Motorspannung 0 {V} 999 Anzeige
C53
Zwischenkreis-
spannung
0 {V} 999 Anzeige
C54
Motorstrom 0,0 {A} 400 Anzeige
C56
Reglerauslastung 0 {%} 255 Anzeige
C57
Motordrehmoment 0 {%} 400 Anzeige: nur Vektorbetrieb (C14 = 4, 5)
C65
Verstärkung der
vektorgeregelten
Drehzahlregelung
30,0 0,0 100 Optimierung der dynamischen Leistung im
Vektorbetrieb
C66
Drehzahlstabilität im
Vektorbetrieb
30,0 0,0 100 Optimierung der statischen Drehzahlstabilität
im Vektorbetrieb
 Loading...
Loading...