LIVOX HAP
User Manual
14
©
2022 Livox Tech All Rights Reserved.
Usage
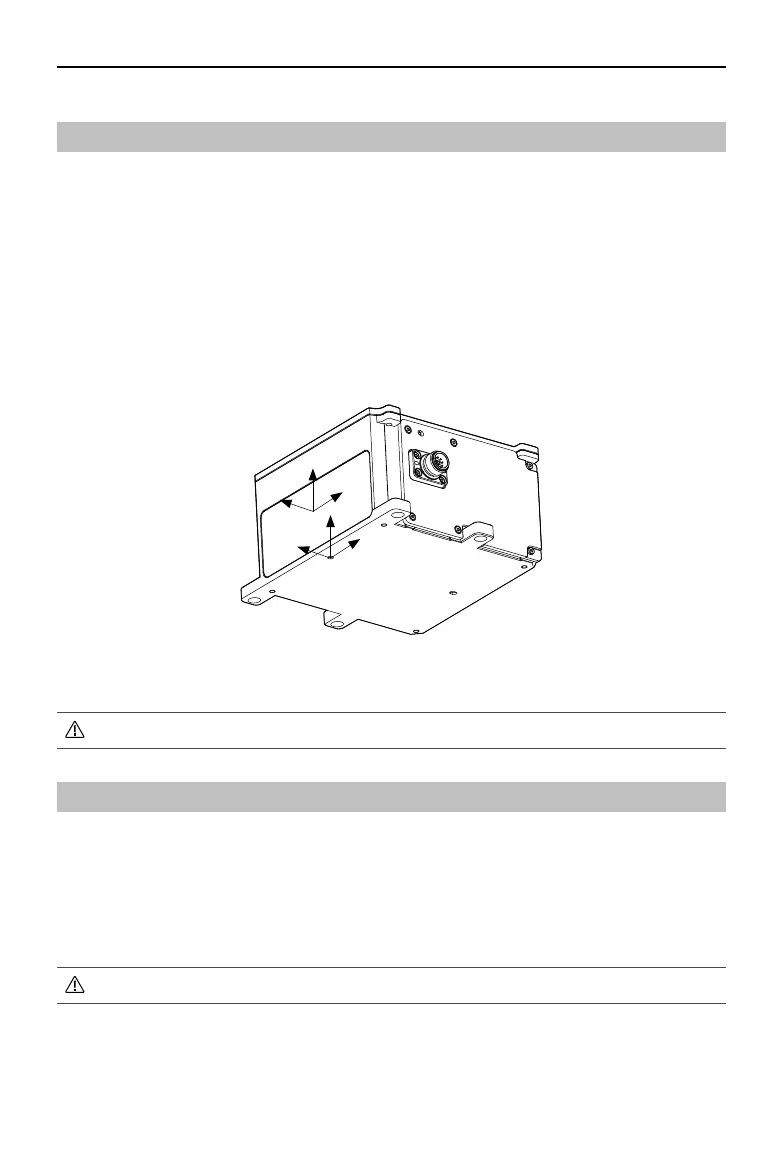
Coordinates
The coordinates of the HAP (TX) are dened as shown below.
Positioning Coordinates O'-X'Y'Z': Point O' is the intersection point between the bottom surface
and the locating hole 1. The Z' axis is the normal vector perpendicular to the bottom surface, and
the X' axis is the normal vector perpendicular to the optical window surface.
Point Cloud Coordinates O-XYZ: Point O is the center of the optical window surface, and its
coordinates directions are the same with that of the Positioning Coordinates.
The position and pose relation of the point cloud coordinate system relative to the positioning
coordinate system is: (X, Y, Z, Roll, Pitch, Yaw)-> (8mm, 0 mm, 23 mm, 0°, 0°, 0°).
For the HAP (TX) with built-in IMU, the angular velocity direction follows the right hand rule.
Output Data
The output information of HAP (TX) LiDAR sensors includes:
• Point Cloud Data (including timestamp)
• IMU Data (including timestamp)
• Control Command ACK
• Information Push
Only the HAP (TX) with built-in IMU will output IMU data.
Z
Z'
Y
Y'
X
X'
O
O'
Figure 5.1.1 HAP (TX) Coordinates