22 23Detector Sounds
Target Response
(Metal Object Response)
This is a change in the tone (pitch) and volume
of the Threshold when a target is detected
and not discriminated (rejected).
Threshold
(Background sound)
This is the background sound produced
by the detector. When a target is detected,
the Threshold (p. 33) changes in volume
and pitch. Listen to the Threshold carefully.
Concentration is an important part of
detecting. A very deep or small target may
only cause a very small change to
the Threshold.
Electrical Interference
The detector may produce random sounds
even when the coil is motionless. These will
not be target signals, but signals caused from
the surrounding environment. The GPX Series
have a Tune (p. 31) function to overcome
electrical interference.
Ground Noise
Certain minerals may cause the detector
to produce various sounds; often referred
to as false signals. The GPX Series have an
automatic Ground Balance function (p. 38) to
compensate for ground mineralisation and
overcome ground noise.
Blanking
When the detector is in Iron Reject mode and
sweeping over a ferrous target the Threshold
‘blanks’ (becomes silent), indicating that a
target is located underneath the coil but has
been rejected. Blanking (p. 73) is a useful
way of distinguishing between desired and
undesired targets.
Low Battery
When the battery voltage (p. 51) is low, a
series of alarm signal pulses are given at one
minute intervals.
Note: The GPX Series are
‘motion’ detectors. This means
the coil must be moving
over the target, or the target
moving over the coil, in order
for the detector to ‘see’ it.
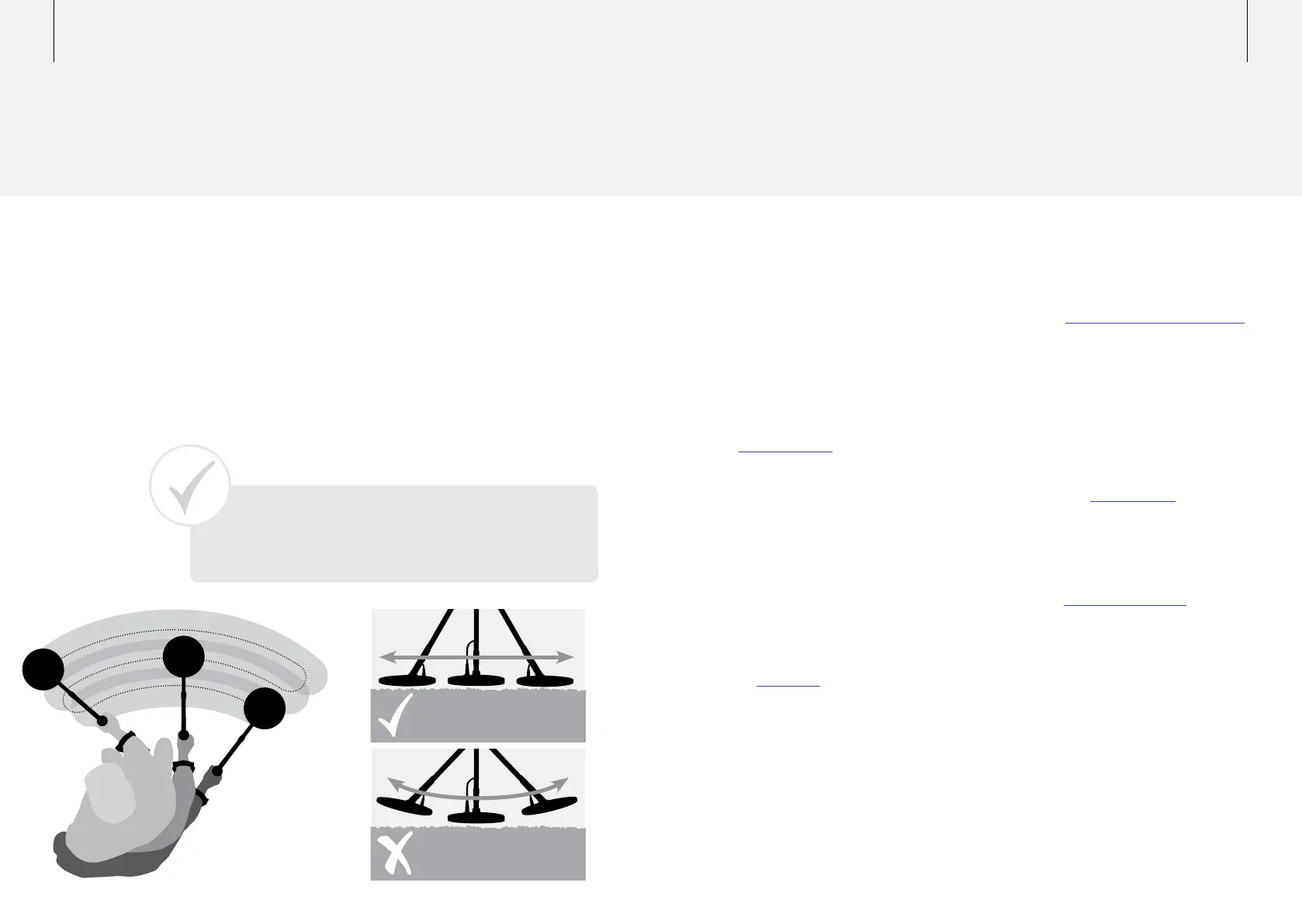
The GPX Series detectors will perform at their best when the
coil is kept close and parallel to the ground at all times. This
will increase the detection depth and target response
to small objects.
A variation in coil height at the end of each swing may cause
confusing sounds and reduce detection depth; an even flat
sweep is desirable.
Practise sweeping the coil over the ground in a side-to-side
motion, while walking forward slowly at the end of each
sweep. Slightly overlap the previous sweep to ensure full
ground coverage. An average sweep speed is four seconds
from left to right to left.
Tip: When using a Monoloop coil more overlap is required to
ensure that targets at maximum depth are not overlooked (see
p. 83 for a diagram showing coil search patterns).
Detecting Basics
 Loading...
Loading...










