6. SERVO PROGRAMS FOR POSITIONING CONTROL
6 − 12
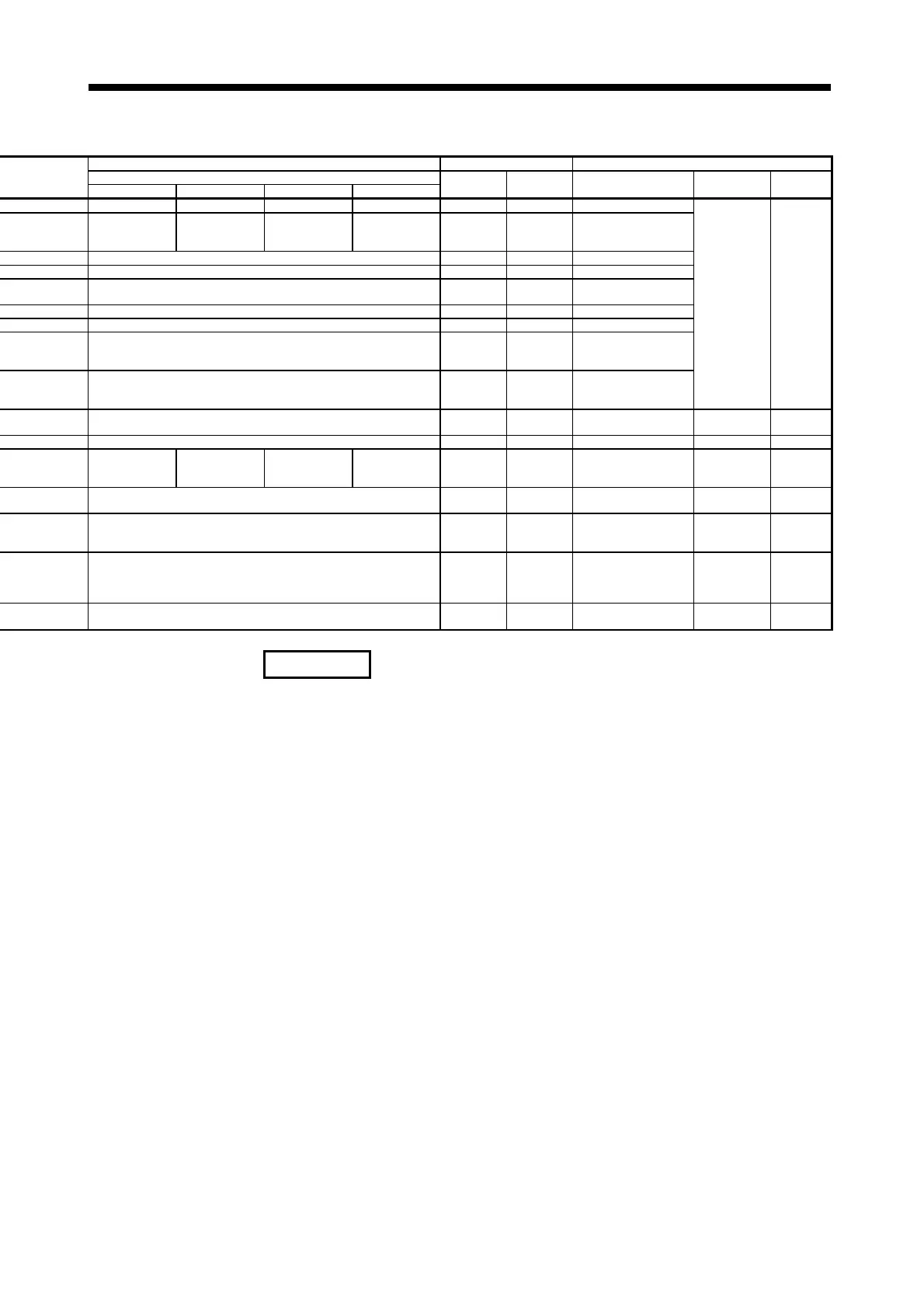
Settings Made Using the Sequence Program (Indirect Setting) Indirect Setting Processing in Event of Setting Error
Setting Range
mm inch degree PULSE
Possible/Not
Possible
Number of
Words Used
Error Item Data(note-4)
(Stored in D9190)
Control Using
Default Value
Starting not
Possible
0123" 111
1 to 600000000
(×10
−2
mm/min)
1 to 600000000
(×10
−3
inch/min)
1 to 2147483647
(×10
−3
degree/min)
1 to 10000000
(PLS/s)
" 212
1 to 65535 (ms) " 113
1 to 65535 (ms) " 114
1 to 65535 (ms) " 115
1 to 100 (%) " 221
1 to 500 (%) " 116
0: Deceleration to a stop in accordance with the deceleration time
1: Deceleration to a stop in accordance with the rapid stop deceleration time
" 1
0 to 100000 " 217
"
1 to 32767 " 18 Controlled by K1
0 to 4095 " 19 "
1 to 600000000
(×10
−2
mm/min)
1 to 600000000
(×10
−3
inch/min)
1 to 2147483647
(×10
−3
degree/min)
1 to 10000000
(PLS/s)
" 24
"
(Note-2)
"
(Note-3)
0 to 4095 " 1
1 to 5000 (ms) " 113 "
REMARKS
(Note-2) : When an error occurs because the speed limit value is exceeded,
control is executed at the speed limit value.
(Note-3) : Applies when the commanded speed is "0".
(Note-4) : If there are multiple errors in the same program, the latest error item
data is stored.

 Loading...
Loading...





