6. SERVO PROGRAMS FOR POSITIONING CONTROL
6 − 11
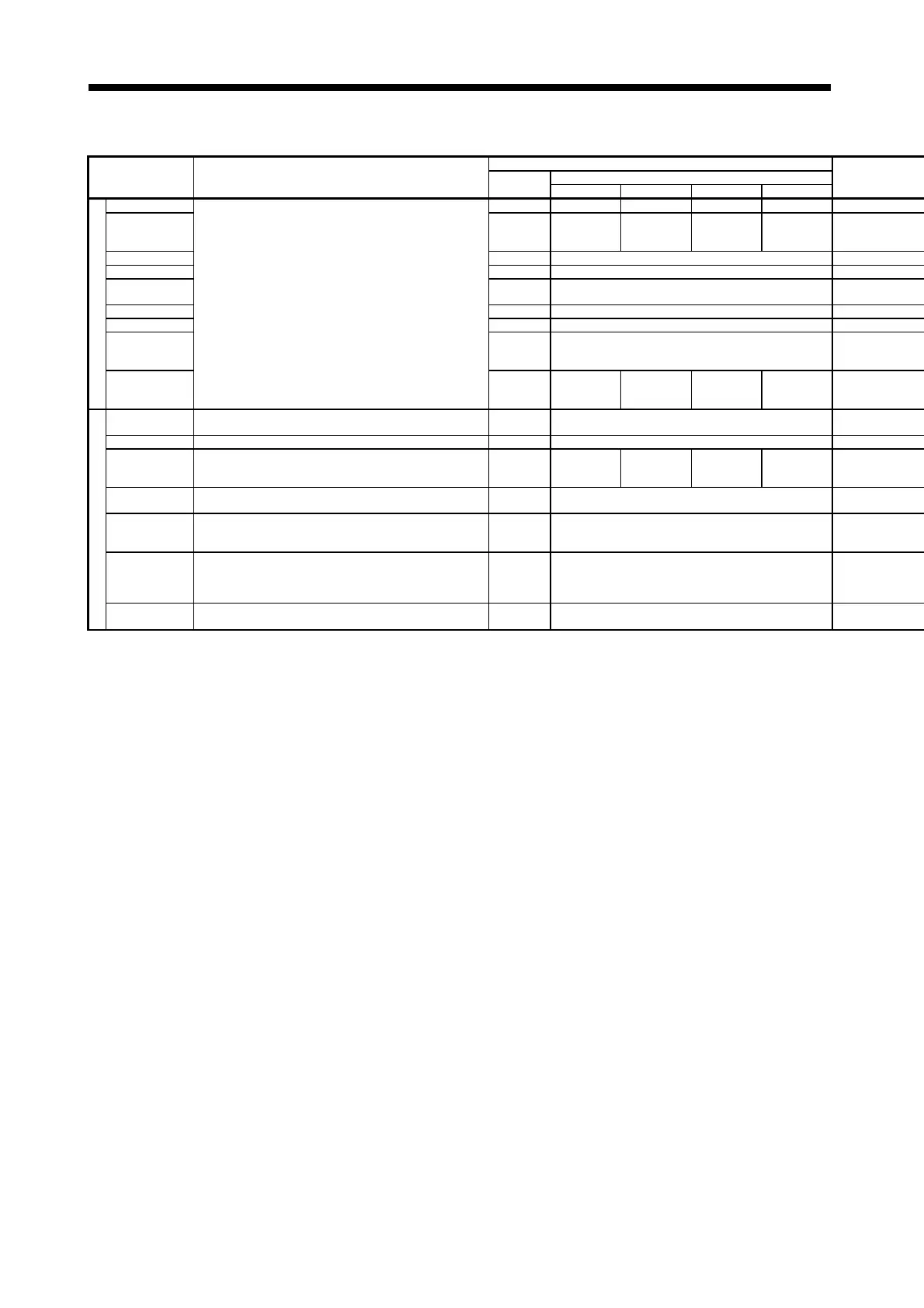
Table 6.3 Positioning Data (Continued)
Setting Made With Peripheral Device
Setting RangeName Explanation
Default
Value
mm inch degree PULSE
control unit 30123
Speed limit value
200.000
(PLS/s)
0.01 to
6000000.00
(mm/min)
0.001 to
600000.000
(inch/min)
0.001 to
2147483.647
(degree/min)
1 to 10000000
(PLS/s)
Acceleration time 1000 (ms) 1 to 65535 (ms)
Deceleration time 1000 (ms) 1 to 65535 (ms)
Rapid stop
deceleration time
1000 (ms) 1 to 65535 (ms)
S-curve ratio 0 (%) 1 to 100 (%)
Torque limit value 300 (%) 1 to 500 (%)
Deceleration
processing on
STOP input
0
0 : Deceleration to a stop in accordance with the deceleration time
1 : Deceleration to a stop in accordance with the rapid stop
deceleration time
Parameter block
Allowable error
range for circular
interpolation
! It is possible to set only those items in the set parameter block
data that you want to change.
! For details on each data item, see Section 4.4 "Parameter Block".
100 (PLS)
0 to 10000.0
(
µ
m)
0 to 1.00000 0 to 1.00000 0 to 100000
##Repeat condition
Set the repeat condition for repetition between the FOR-TIMES
instruction and the NEXT instruction.
1 to 32767
Program No. Set the program numbers for simultaneous starts. 0 to 4095
Commanded speed
(constant-speed)
Set the speed for points part way through positioning in the servo
program.
0.01 to
6000000.00
(mm/min)
0.001 to
600000.000
(inch/min)
0.001 to
2147483.647
(degree/min)
1 to 10000000
(PLS/s)
Cancel
Set to end execution of a servo program by deceleration to a stop by
turning ON a designated bit device in that program.
X, Y, M, TC, TT, CC, CT, B, F
Start
! Set to automatically start a designated program after execution of
"cancel" above.
! Can only be set when "cancel" has been set.
K0 to K4095
Skip
Set in order to cancel positioning at a pass point and carry out
positioning a the next pass point by turning ON a designated bit
device during execution of positioning at each of the pass points
associated with a constant-speed control instruction.
X, Y, M, TC, TT, CC, CT, B, F
Others
FIN acceleration/
deceleration
Set in order to execute positioning at each pass point associated with
a constant-speed control instruction by turning ON the FIN signal.
1 to 5000 (ms)

 Loading...
Loading...





