APPENDICES
APP − 13
(3) Positioning control errors (200 to 299)
The errors shown in this section are those detected during positioning control.
Error codes, causes and corrective actions are shown in Table 2.5.
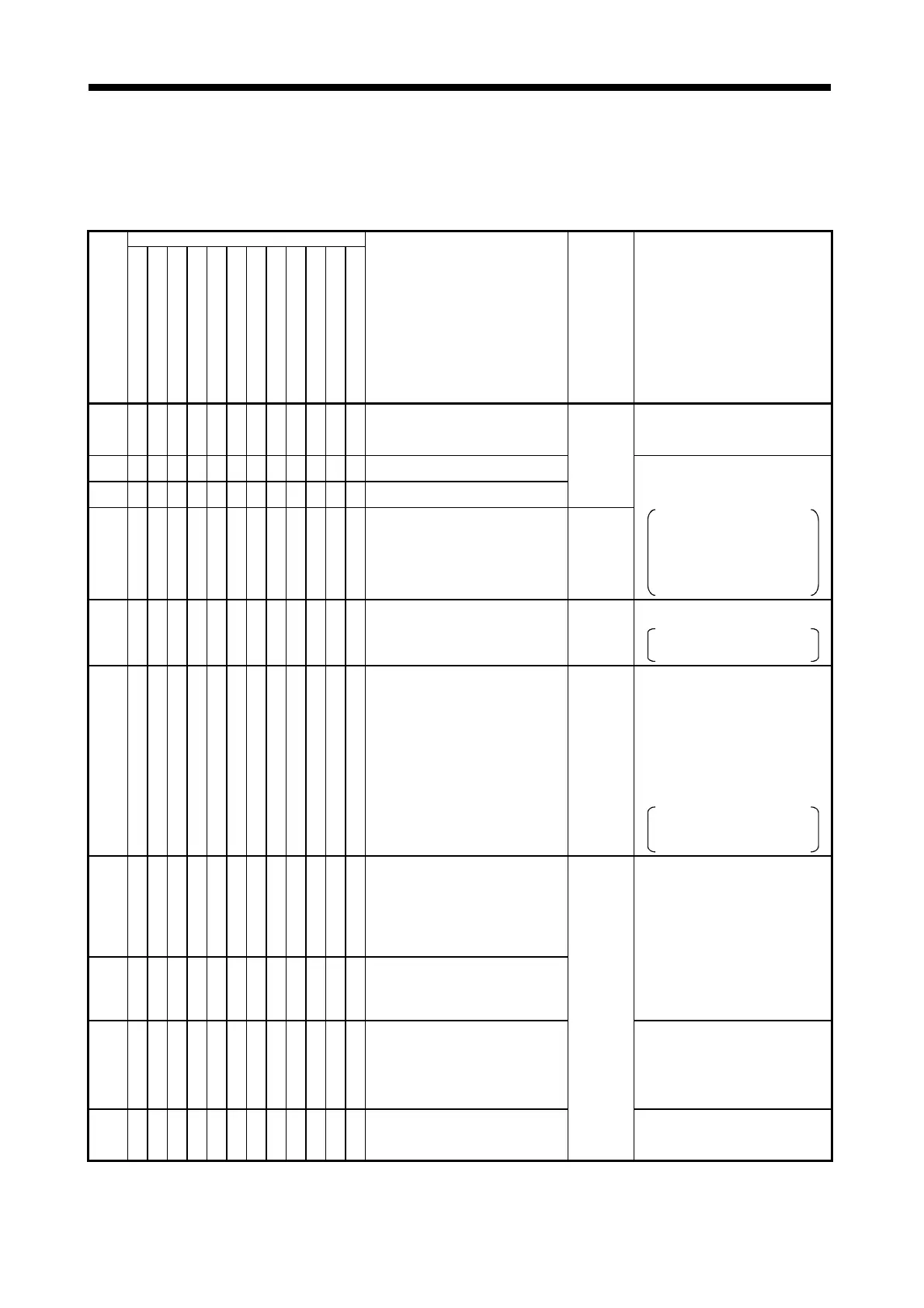
Table 2.5 Positioning Control Start-Up Error List (200 to 299)
Control Mode
Error
Code
Positioning
Fixed-Pitch Feed
Speed
Speed/Position Switching
Speed Switching
Constant-Speed
JOG
Manual Pulse Generator
Zeroing
Position Follow-Up Control
OSC
Error Cause
Error
Processing
Corrective Action
200 !!!!!!!! !!
• The PLC ready flag (M2000) was turned
OFF while positioning was being started in
response to a start request issued by a
sequence program.
• Turn the PLC ready flag (M2000) ON after
all axes have stopped.
201 !
• The PLC ready flag (M2000) was turned
OFF during a zeroing operation.
202 !
• The stop command (M3200+20n) has been
turned ON during a zeroing operation.
Axis motion
decelerates
to a stop.
203 !
• The rapid stop command (M3201+20n) has
been turned ON during a zeroing operation.
Axis motion
stops
immediately.,
• After turning the PLC ready flag (M2000)
ON or turning the stop command
(M3200+20n) or rapid stop command
(M3201+20n) OFF, re-attempt zeroing.
In the case of a proximity dog type
zeroing, use JOG operation or
positioning operation to return the axis
to the point before the proximity dog
signal was output, and re-attempt
zeroing.
204 !!!!!!!!!!!
• The PLC ready flag (M2000) was turned
back ON during deceleration initiated by
turning OFF the PLC ready flag (M2000).
No
processing
• Turn the PLC ready flag (M2000) ON after
all axes have stopped.
Turning ON the PLC ready flag
(M2000) during deceleration is ignored.
206 !
• While a zeroing operation was in progress,
an emergency stop was executed in the test
mode at a peripheral device by pressing the
[Back Space] key.
Axis motion
stops
immediately.
• In the case of a proximity dog type zeroing,
use JOG operation or positioning operation
to return the axis to the point before the
proximity dog signal was output, and re-
attempt zeroing.
• If the proximity dog signal is turned OFF
when executing a count type zeroing, use
JOG operation or positioning operation to
return the axis to the point before the
proximity dog signal was output, and re-
attempt zeroing.
In the proximity dog signal is
turned ON when executing count type
zeroing, re-attempt the zeroing.
207 !!!!!
• The feed current value exceeded the stroke
limit during positioning.
In the case of circular interpolation, an error
code is stored only for axis whose feed
current value exceeded the stroke limit.
In the case of linear interpolation, error
codes are stored for all axes involved in the
interpolation.
208 !!!!
• During circular interpolation or during
simultaneous operation of multiple manual
pulse generators, the feed current value of
another axis exceeded the stroke limit value.
(For detection of other axis errors).
• Correct the stroke limit or travel value
setting so that positioning is executed
within the stroke limit.
209 !!
• An overrun has occurred because the set
travel value exceeds the deceleration
distance when a speed/position change
(CHANGE) signal is input during
speed/position switching control, or when
the proximity dog signal is input during
count type zeroing.
• Correct the speed setting so that overrun
does not occur.
• Set a travel value which will not cause an
overrun.
210 !
• During speed/position switching control, the
set travel value exceeds the stroke limit
when a speed/position switching (CHANGE)
signal is input.
Axis motion
decelerates
to a stop.
• Correct the stroke limit or travel value
setting so that positioning is executed
within the stroke limit.

 Loading...
Loading...





