5.4
Position Data, Home Position and
Current Position
• The position data includes the following:
HP: Home position, P(I): Set position (I), P(II): Set
position (II) and CP: Current position
The unit and the multiplication of each item are
described in Section 5.2.
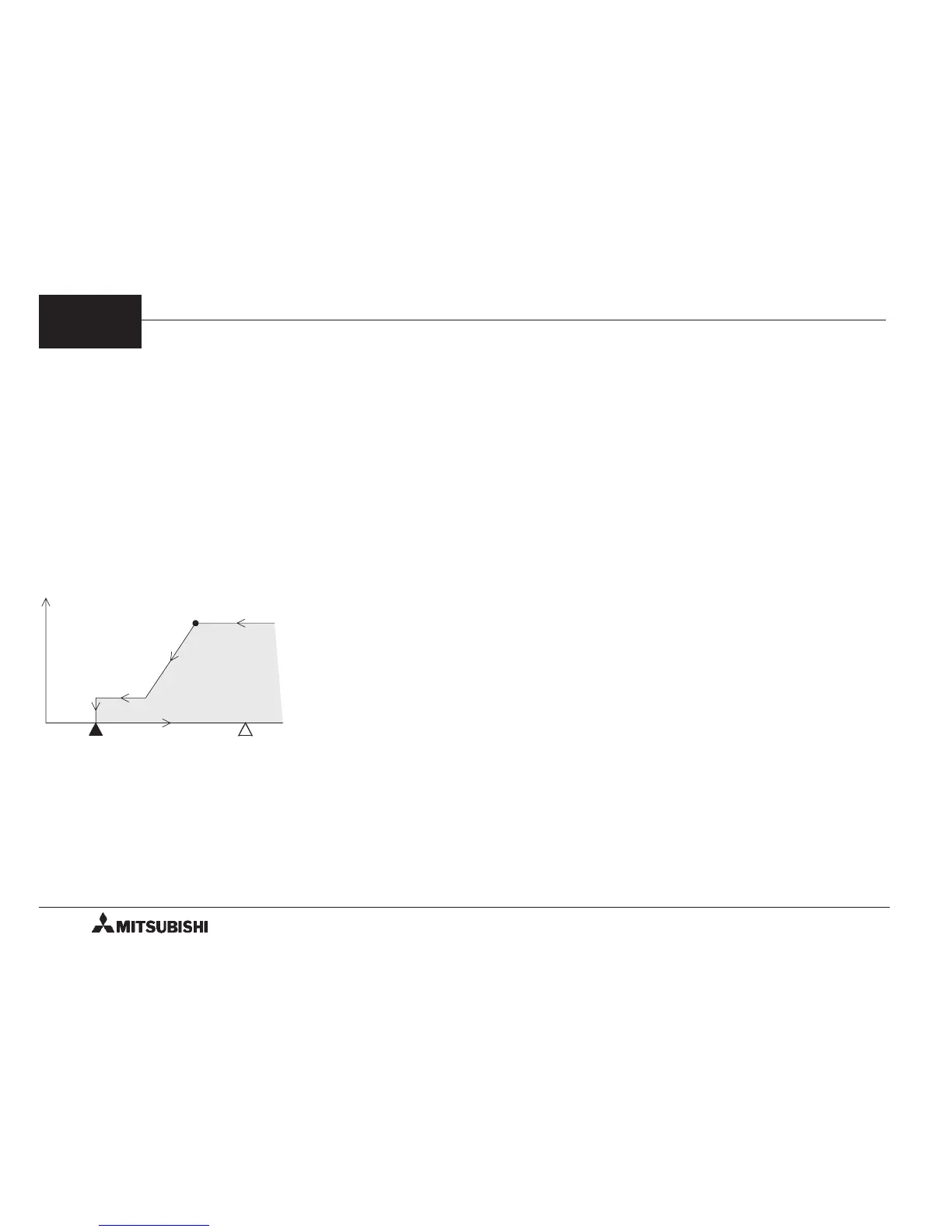
• When the operation of returning to the machine
home position is completed, the home position HP
(BFMs #14 and #13) value is automatically written
to the current position CP (BFMs #27 and #26).
The figure below shows the CP value when the
home position HP is -100.
• The set positions P(I) and P(II) can be treated as
absolute positions (distance from the current position
CP = 0) or relative positions (travel from the current
stop position) as described later.
< Error in command between the machine system
of units and the combined system of units>
When the pulse rate of the BFM #0 (#2, #1) is supposed
the pulse rate as A, the feedrate as B and the relative
travel distance as C, the value “C × (A/B)” indicates the
pulse quantity which should be generated by the PGU.
Even if the value “(A/B)” is not an integer, error is not
generated in the command if the value “C × (A/B)” is an
integer.
However, if the value “C × (A/B)” is not an integer,
accumulated error is generated in the current position
when relative movement is repeated. When the
absolute is used for operation, an error less than 1 pulse
may be generated by counting fractions over 1/2 as one
and disregarding the rest, but accumulated error is not
generated.
When the motor system of units is used, such an
accumulated error is not generated.
Speed
PG0
DOG
Machine home position
CP=HP=–100
CP=0
The current position
(CP) value increases
or decreases in
accordance with the
forward/reverse pulse.
5
FX-1PG/FX
2N
-1PG PULSE GENERATOR UNIT BFM LIST
5-9

 Loading...
Loading...