6 - 6
MELSEC-Q
6 SEQUENCE PROGRAM USED FOR POSITIONING CONTROL
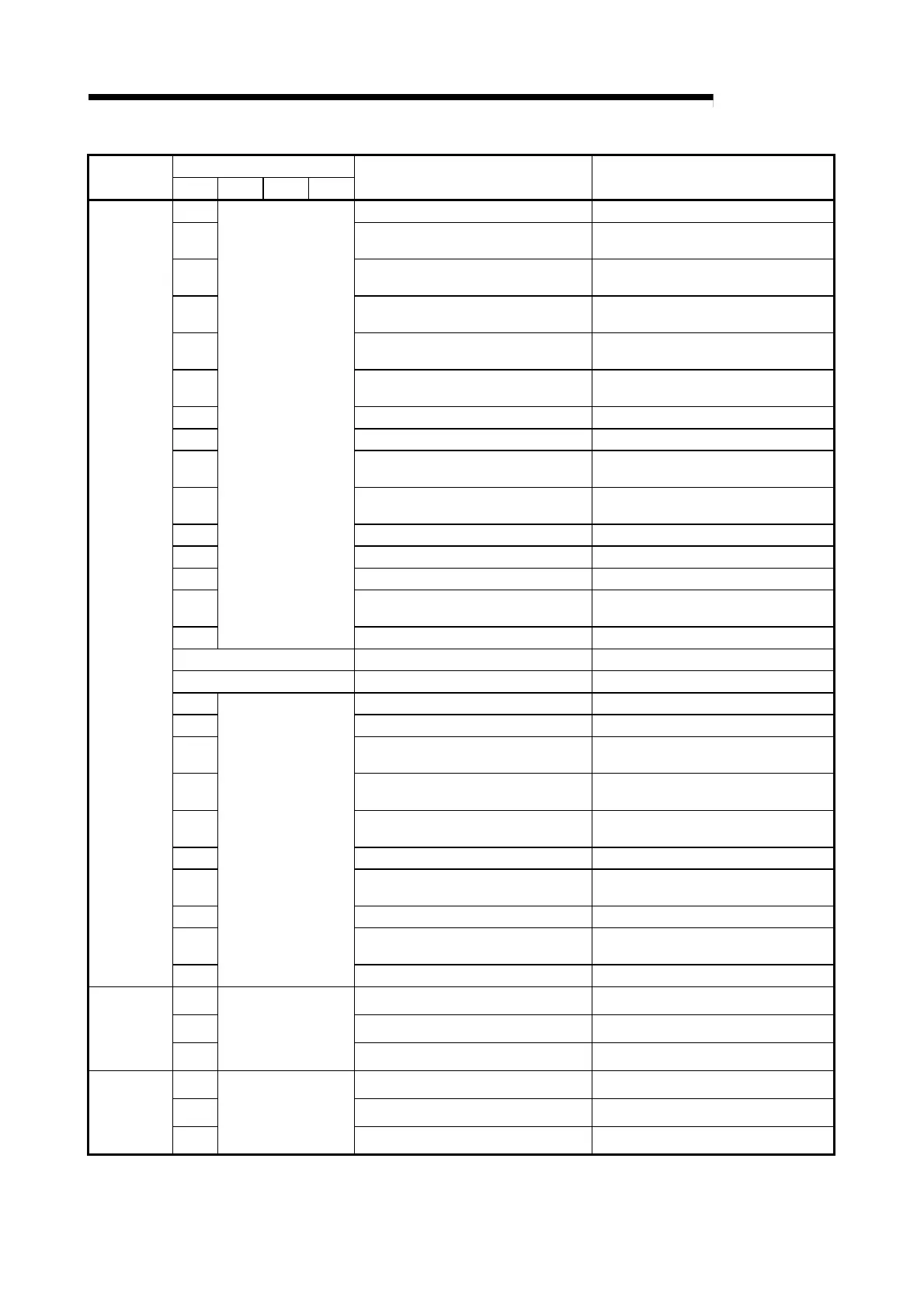
Device
Device
name
Axis 1 Axis 2 Axis 3 Axis 4
Application Details when ON
X2C
M code OFF command Commanding M code OFF
X2D
JOG operation speed setting
command
Commanding JOG operation speed
setting
X2E
Forward run JOG/inching command
Commanding forward run JOG/inching
operation
X2F
Reverse run JOG/inching command
Commanding reverse run JOG/inching
operation
X30
Manual pulse generator operation
enable command
Commanding manual pulse generator
operation enable
X31
Manual pulse generator operation
disable command
Commanding manual pulse generator
operation disable
X32
Speed change command Commanding speed change
X33
Override command Commanding override
X34
cceleration/deceleration time change
command
Commanding acceleration/deceleration
time change
X35
cceleration/deceleration time change
disable command
Commanding acceleration/deceleration
time change disable
X37
Step operation command Commanding step operation
X38
Skip operation command Commanding skip operation
X39
Teaching command Commanding teaching
X3A
Continuous operation interrupt
command
Commanding continuous operation
interrupt command
X3B
—
Restart command Commanding restart
X3C
Parameter initialization command Commanding parameter initialization
X3D
Flash ROM write command Commanding flash ROM write
X3E
Error reset command Commanding error reset
X3F
Stop command Commanding stop
X40
Position-speed switching operation
command
Commanding position-speed switching
operation
X41
Position-speed switching enable
command
Commanding position-speed switching
enable
X42
Position-speed switching prohibit
command
Commanding position-speed switching
prohibit
X43
Speed change command Commanding speed change
X44
Inching movement amount setting
command
Commanding inching movement
amount setting
X45
Target position change command Commanding target position change
X4D
Speed-position switching control (ABS
mode) setting command
Commanding speed-position switching
control (ABS mode) setting
External
input
(command)
X4E
—
Positioning start command (Y start) Positioning start command being given
X47 ABS data bit 0 —
X48 ABS data bit 1 —
External
input
(absolute
position
restoration
X49
—
Transmission data READY flag —
Y50 Servo ON signal —
Y51 ABS transmission mode —
External
output
(absolute
position
restoration
Y52
—
ABS request mode —
 Loading...
Loading...
