12 - 21
MELSEC-Q
12 CONTROL SUB FUNCTIONS
[2] Control Precautions
(1) If the movement amount designated by the positioning data is small when
the continuous path control is executed, the output speed may not reach the
designated speed.
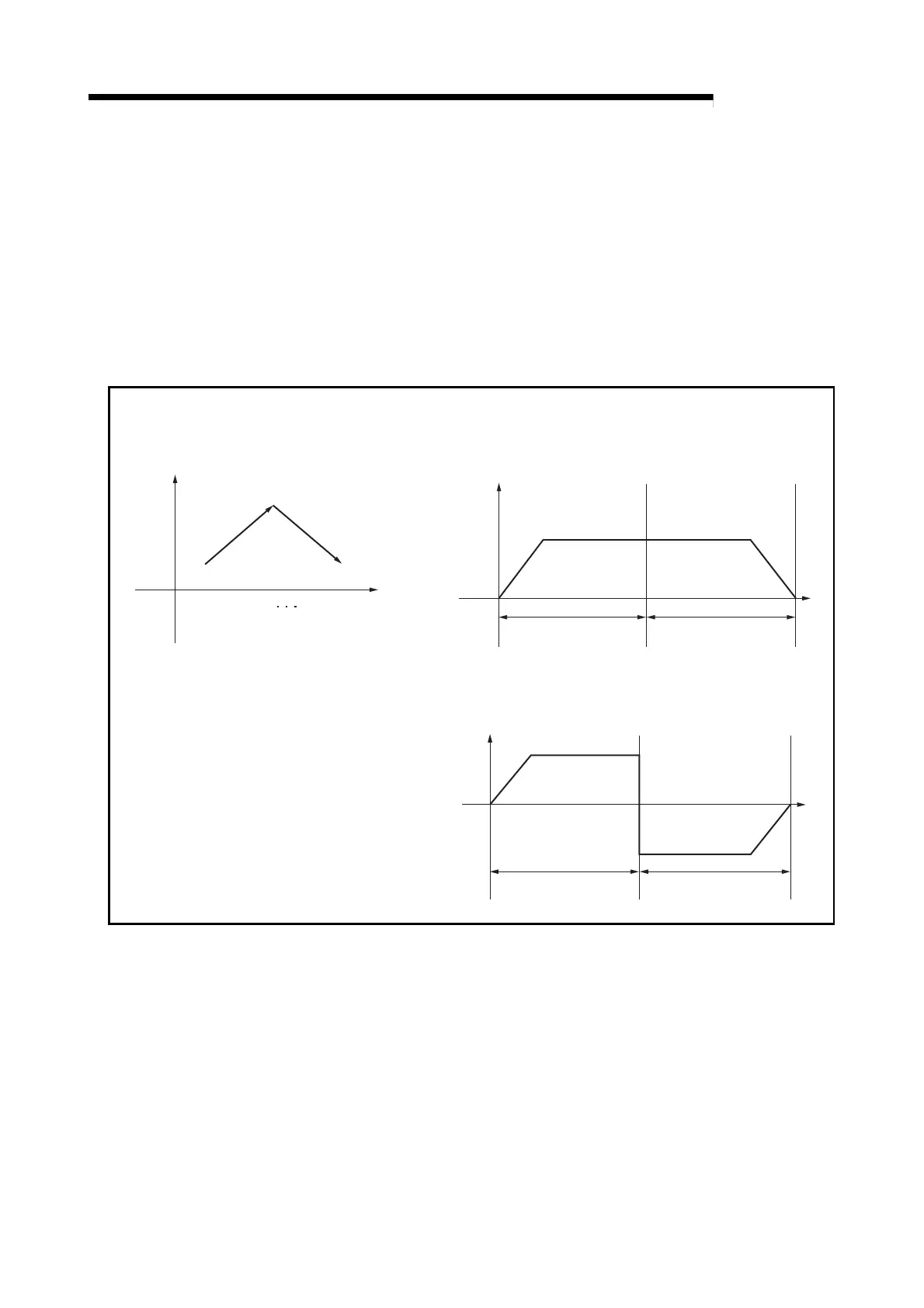
(2) The movement direction is not checked during interpolation operation.
Therefore, a deceleration stops are not carried out even the movement
direction changes. (See below) For this reason, the output will suddenly
reverse when the reference axis movement direction changes. To prevent
the sudden output reversal, assign not the continuous path control "11", but
the continuous positioning control "01" to the positioning data of the passing
point.
[Positioning by interpolation] [Operation of reference axis]
Positioning
data No.1
Positioning
data No.2
Positioning data No.1 Continuous path control
Partner axis
Reference
axis
Positioning data No.2Positioning data No.1
v
t
[Operation of partner axis for interpolation]
Positioning data No.2Positioning data No.1
v
t
Fig. 12.12 Path and output speed of various axes when movement direction varies during continuous
path control
 Loading...
Loading...
