3.2.4 Palletising
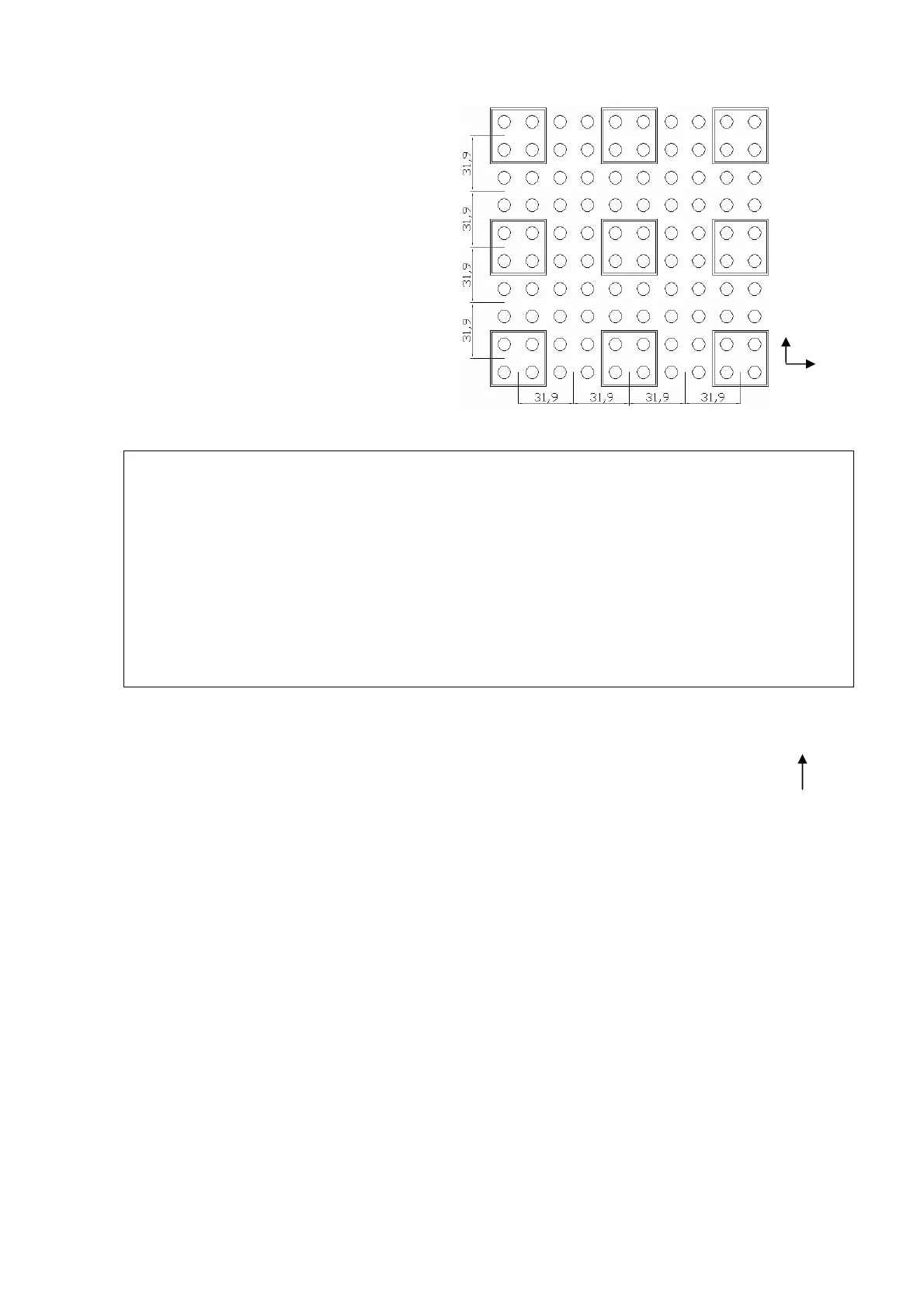
Example program Pr4 shows how to
create a matrix/grid of target points
out of 3 corner points. This is very
useful if the robot has to palletise
objects. It can also be used to define
the grid of the Duplo board. A square
Duplo brick is approximately 31.9mm
x 31.9mm. The example program
shows how to define a grid of 3 by 3
bricks using the corner point P1, P2
and P3 (see figure on the right)
P3
DEF POS P10
P2 = P1 ‘copy coordinates from P1 into P2
P3 = P1 ‘copy coordinates from P1 into P3
P2.X = P2.X + 31.9 * 4.0 ‘modify the copy P2 : extend the X component
P3.Y = P3.Y + 31.9 * 4.0 ‘modify the copy P3 : extend the Y component
DEF PLT 1,P1,P2,P3, ,3,3,1 ‘define a pallet called “PLT 1” made of 9 points (3x3)
‘use P1,P2 and P3 to determine the end points of the pallet
M8 = 5 ‘set the integer variable M8 to 5
P10 = PLT 1,M8 ‘select the fifth position in the pallet and copy it to P10
MOV P10 ‘go to that selected position
Pr3: Defining and using a grid of coordinates
3.3 Variables
Variables can be of different types. The most useful variable type is a position.
A position variable should start with “P”. The position variables P1…P99 are defined,
therefore a DEF POS command is not required for these.
Position variables can be modified. Suppose a teach-point P1 is stored in memory.
To increase the x-component 10 mm use:
P1.X = P1.X + 10
To change P1, rotating around the end-effector’s y-axis 0.07 radians use:
P1.B = P1.B - 0.07
P2
P1
X
Y
RV-2AJ Robot Programming LAB NOTES Version 0.6 Nov 2005
10
 Loading...
Loading...





