ROYAL SX
104
21.2. Model helicopters
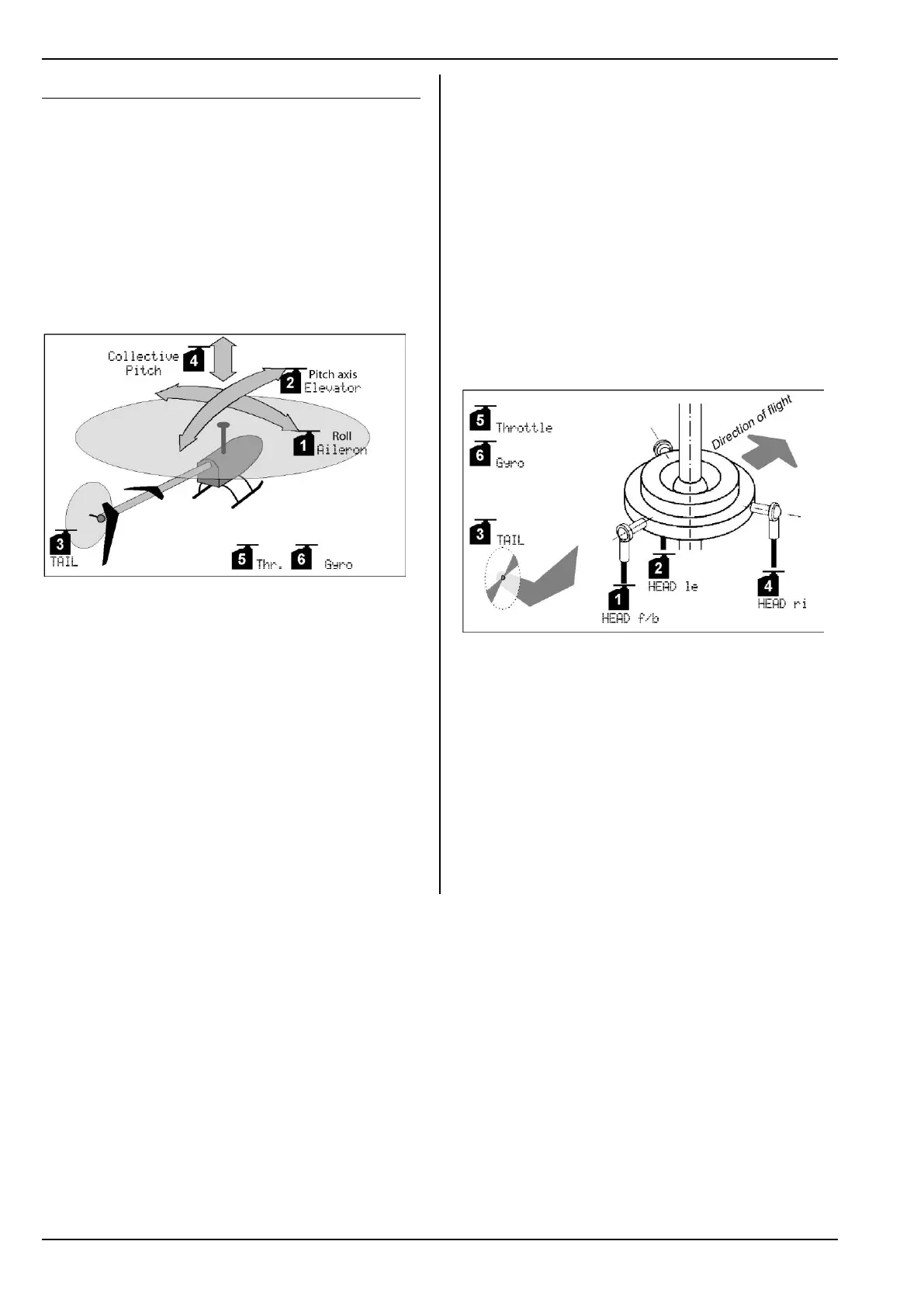
21.2.1. HELImech model template
Suitable for:
Main rotor control system with mechanical mixers.
Typical models:
Ergo, Futura, Moskito, Raptor.
Assigned transmitter controls and switches:
Assignment used: HELI
You will find an overview of the global assignment of
transmitter controls and switches in Chapter ( 22.1.).
Assigned servos / receiver outputs:
Servo configuration MPX-UNI
Timer setting: Motor run time
Sum timer ´ controlled by throttle limiter (F).
Fine-tuning:
a. Check stick functions (roll / pitch / yaw).
Select different stick mode if necessary:
L, Assignment, Mode.
b. Check servo directions for all functions.
Reverse servos if necessary (REVERSE):
K, Calibrate, select servo, Parameter REV/TRM.
c. Gyro
( 13.7.).
21.2.2. HELIccpm model template
Suitable for:
Main rotor control system with electronic mixers
CCPM (Cyclic Collective Pitch Mixing)
with three or four servos, 90° to 150°.
Typical models:
Raptor E550, T-Rex 450 – 600, ECO 8, Logo,
Fury, Three Dee NT, Uni-Expert.
Assigned transmitter controls and switches:
Assignment used: HELI
You will find an overview of the global assignment of
transmitter controls and switches in Chapter ( 22.1.).
Assigned servos / receiver outputs:
In the model template HELIccpm we assume a 120°
swashplate with pitch-axis servo at the rear:
Servo configuration MPX-UNI
Timer setting: Motor run time
Sum timer ´ controlled by throttle limiter (F).
Fine-tuning:
a. Check stick functions (roll / pitch / yaw).
Select a different mode if necessary:
L, Assignment, Mode.
b. Check direction of servo rotation for all functions
Reverse servo direction if necessary (REVERSE):
K, Calibrate, select servo, parameter REV/TRM.
c. Possible gyro facilities
( 13.7.).