Distributor of Olimex LTD: Excellent Integrated System Limited
Datasheet of LPC-P11C24 - DEV BOARD FOR LPC11C24 CORTEX M0
Contact us: sales@integrated-circuit.com Website: www.integrated-circuit.com
OLIMEX© 2012 LPC-P11C24 user's manual
6.8 CAN interface
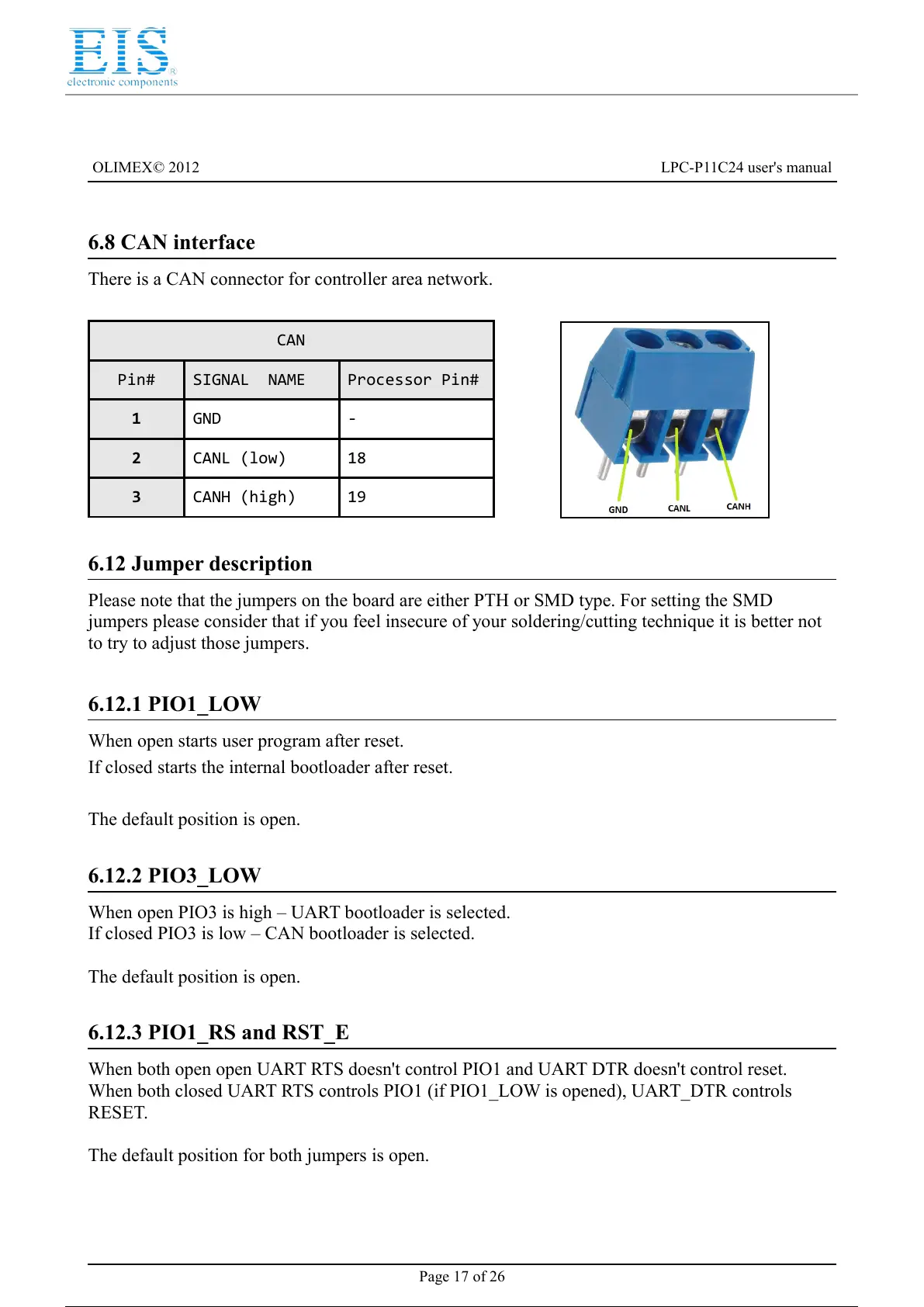
There is a CAN connector for controller area network.
CAN
Pin# SIGNAL NAME Processor Pin#
1 GND -
2 CANL (low) 18
3 CANH (high) 19
6.12 Jumper description
Please note that the jumpers on the board are either PTH or SMD type. For setting the SMD
jumpers please consider that if you feel insecure of your soldering/cutting technique it is better not
to try to adjust those jumpers.
6.12.1 PIO1_LOW
When open starts user program after reset.
If closed starts the internal bootloader after reset.
The default position is open.
6.12.2 PIO3_LOW
When open PIO3 is high – UART bootloader is selected.
If closed PIO3 is low – CAN bootloader is selected.
The default position is open.
6.12.3 PIO1_RS and RST_E
When both open open UART RTS doesn't control PIO1 and UART DTR doesn't control reset.
When both closed UART RTS controls PIO1 (if PIO1_LOW is opened), UART_DTR controls
RESET.
The default position for both jumpers is open.
Page 17 of 26