52
7.3.7. fhsample_move
Function
Move the robot
Syntax
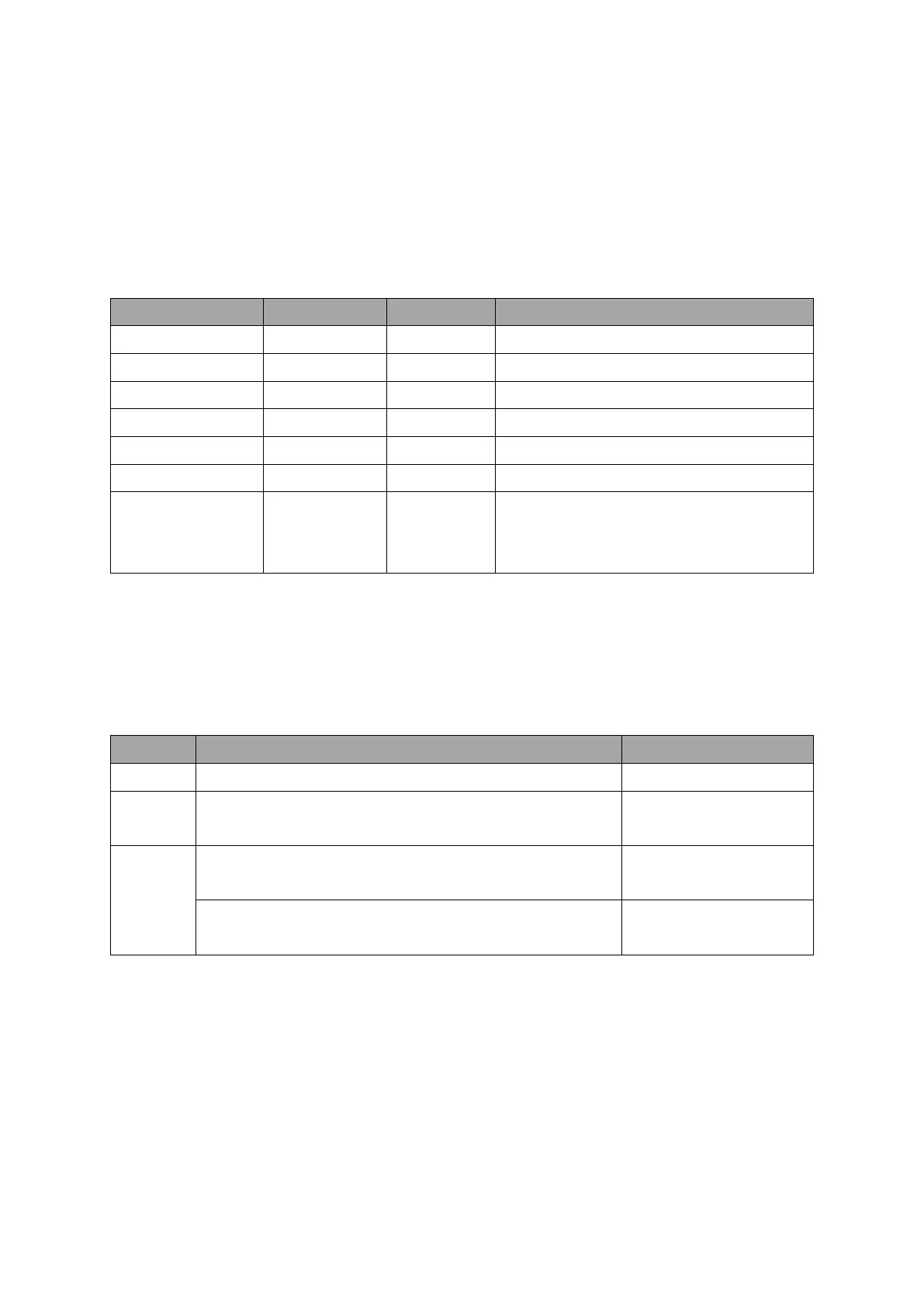
fhsample_move(pos_x, pos_y, pos_z, pos_w, pos_p, pos_r, err_no)
Parameter
Moving target robot coordinates X
Moving target robot coordinates Y
Moving target robot coordinates Z
Moving target robot coordinates W
Moving target robot coordinates P
Moving target robot coordinates R
err_no Output Integer error number
Store the result of the execution of
this function.
Remarks
Moves the robot to the position specified by the parameter.
Returns an error if the target robot position is out of the movement range.
Return Value
-1503 ERROR:fhsample_move():The Robot Position is
out of range error
-1505 ERROR:fhsample_regpos() :
LOCAL_COORDINATE_NO :-1505
Out of the range of
ERROR:fhsample_regpos() :
TOOL_COORDINATE_NO : -1505
Out of the range of
Precautions
None

 Loading...
Loading...














