32
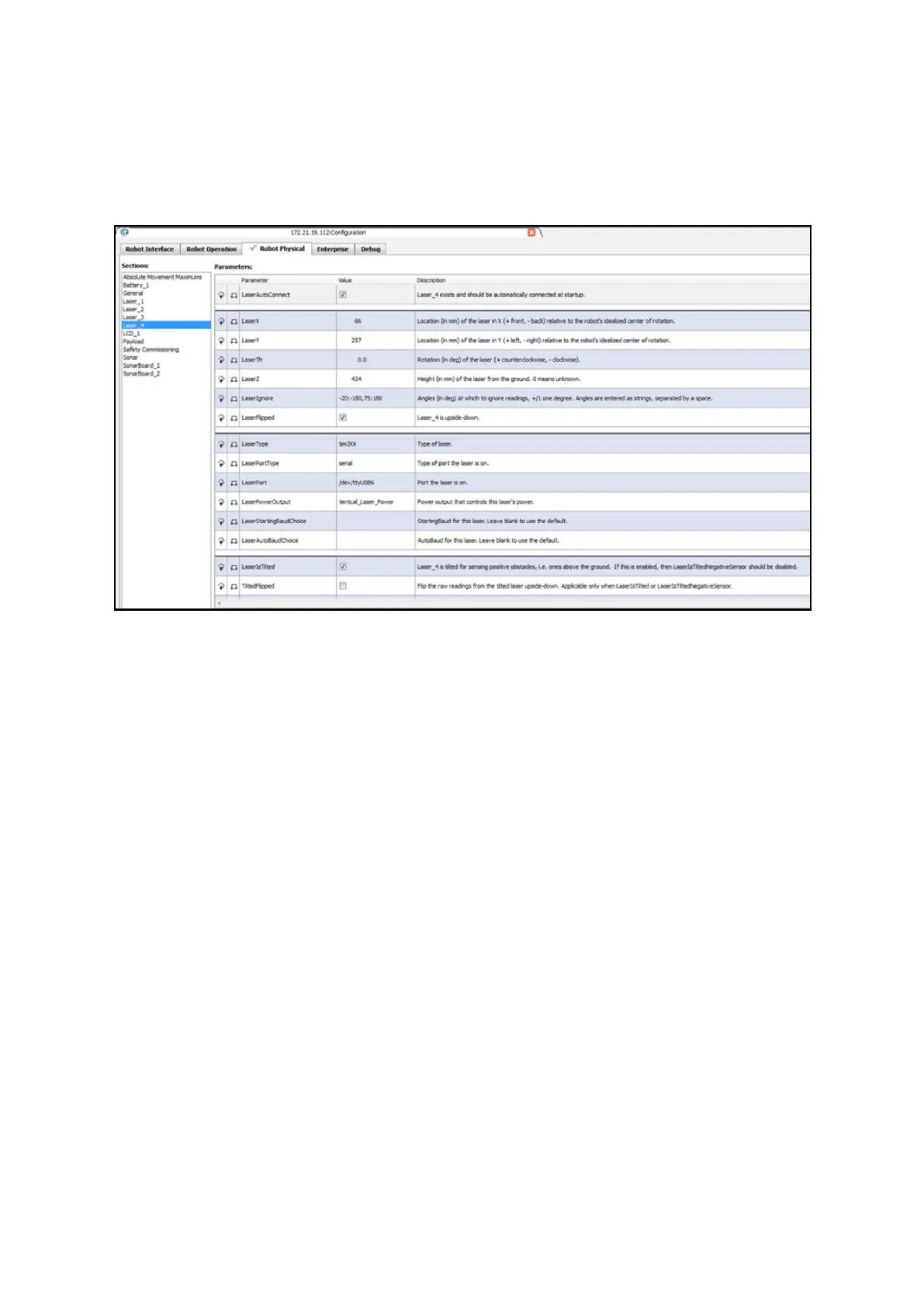
• LaserIsTilted: Designates that the lasers are side-mounted and will scan vertically.
Check the box.
The parameter LaserIsTiltedNegativeSensor should be disabled if this is checked.
Figure 3: MobilePlanner Side Laser Parameters
In MobilePlanner, navigate to Robot Operation > Laser_3 and _4 Tilted. This portion of the configuration
allows the laser to be configured for the application’s specific environment.
In select cases, you will need to modify the Cumulative parameters. Sensor readings are often held on the
map so that the robot remembers an obstacle even when it cannot be actively seen.
The length of time that the robot will remember these readings is MaxSecondstoKeepCumlative. In dynamic
environments where the robot will be encountering many obstacles, but many open paths for the robot
exist, this value should be about five seconds. If your environment has a restricted number of possible robot
paths, this number should stay relatively large, such as thirty seconds, so that the robot does not rediscover
the same obstacle multiple times. Contact your local Omron Support if you have difficulty tuning these
parameters for your environment.