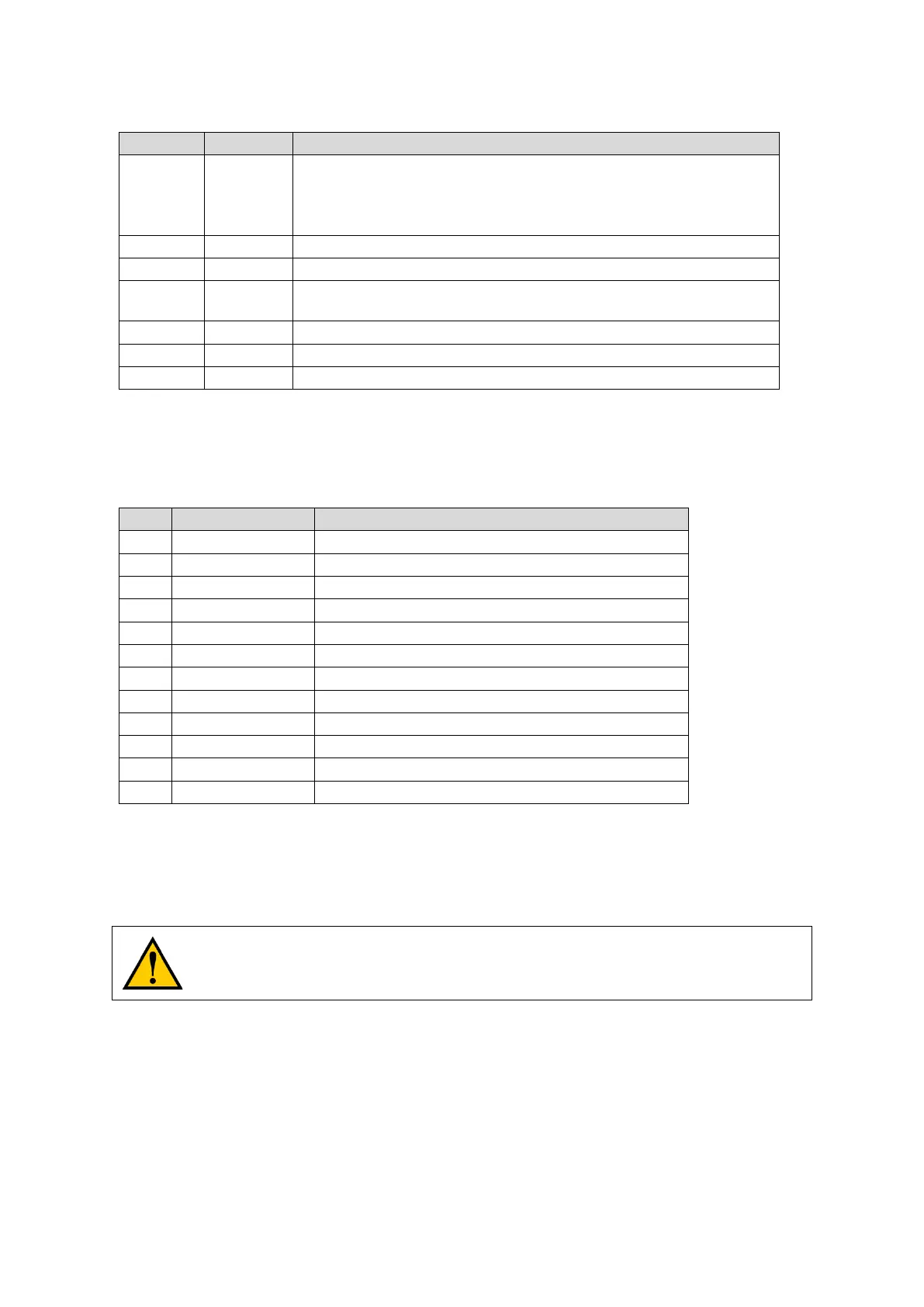
Payload structure bumpers, user-supplied, connected between ESTOP_SRC and
USER_BMP# (for each of the 6 inputs).
Contacts 1 - 3 are for a front bumper, 4 - 6 for rear.
Contacts should be 12 V @ 10 mA.
5, 12, and 20 VDC Outputs
Battery and switched battery power
Directly connected to the externally-mounted Maintenance Ethernet, Auto-MDIX.
Directly connected to the externally-mounted Joystick port
Operator screen, E-Stop, Brake_Rel, ON, OFF
User Interface
Connector type: Mini-Fit® 7 x 2
Use: Brake release, ON, OFF, E-Stop
Short 4 & 11 to close ESTOP_USR_1
Short 5 & 12 to close ESTOP_USR_2
Pins 6 & 13 short when ESTOP_CH1 is closed
Pins 7 & 14 short when ESTOP_CH2 is closed
Short to FBAT_ALWAYS to signal OFF (min 1 s pulse)
Short to FBAT_ALWAYS to signal ON (min 1 s pulse)
Short to FBAT_ALWAYS for manual brake release
Short 4 & 11 to close ESTOP_USR_1
Short 5 & 12 to close ESTOP_USR_2
Pins 6 & 13 short when ESTOP_CH1 is closed
Pins 7 & 14 short when ESTOP_CH2 is closed
NOTE:
An E-Stop jumper or a user-supplied E-Stop button needs to be attached to the
E-STOP port on the User Interface connector for the platform to function. The
jumper is provided as part number 12730-000L. An E-Stop button would be user-
supplied.
CAUTION: If you are using a user-supplied E-Stop, you must run the Safety
Commissioning to verify the E-Stop’s functionality before putting the robot into service.