4-78
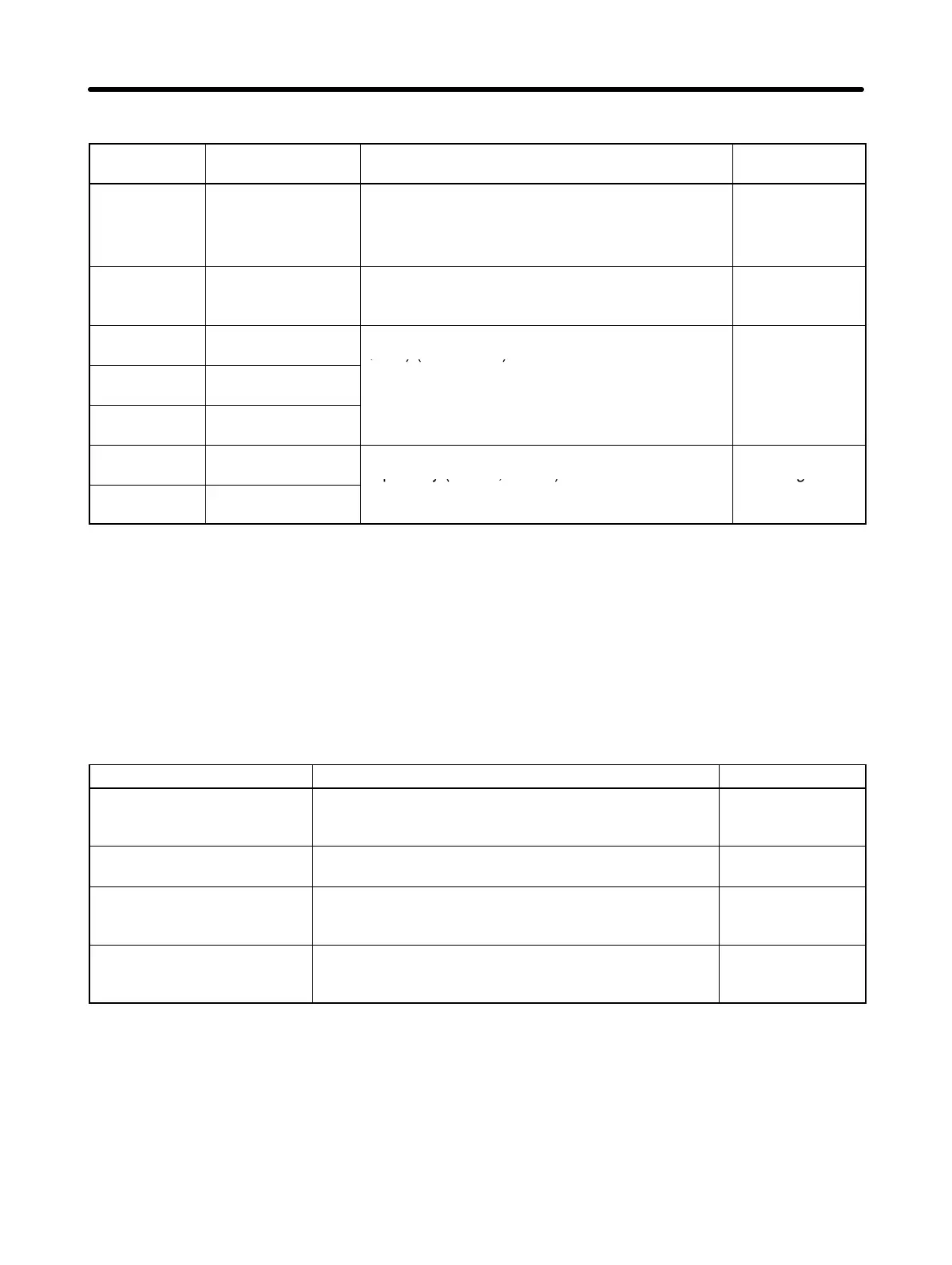
H Parameters Requiring Settings
Parameter
No.
Parameter name Explanation Reference
Pn000.1 Function selection
basic switch 1
Control mode
selection
Select the control mode for the internally-set
speed control (Settings: 3, 4, 5, 6)
4-4-3 Important
Parameters
Pn50C Input signal
selection 3
You must set Pn50C.0 (RDIR signal selection),
Pn50C.1 (SPD1 signal selection), and Pn50C.2
(SPD2 signal selection). (See note 1.)
4-4-3 Important
Parameters
Pn301 No. 1 Internal
speed setting
Set the internally-set speed (r/min.) (0 to 10,000
r/min.) (See note 2.)
4-4-4 Parameter
Details
Pn302 No. 2 internally-set
speed
Pn303 No. 3 internal
speed setting
Pn305 Soft start
acceleration time
Set the acceleration and deceleration times (ms)
separately (0 to 10,000 ms).
4-8-10 P Control
Switching
Pn306 Soft start
deceleration time
Note 1. If changing the default setting, set Pn50A.0 (input signal selection mode) to 1 (user-defined
settings).
Note 2. If the maximum Servomotor rotation speed setting is greater than Pn301, Pn302, and Pn303,
the setting will be taken to be the maximum rotation speed.
H Related Functions
• The main functions related to internal speed setting control that can be used during internal speed
setting control are as follows:
Function name Explanation Reference
Position lock function This function stops the Servomotor in servolock status
(position control status) using PLOCK (position lock
command) signal input.
4-5-14 Position
Lock Function
Torque limit function This function limits the torque output by the
Servomotor.
4-5-10 Torque
Limit Function
Gain reduction function Switches speed loop command from PI control to P
control by inputting a MING (gain reduction) signal to
lower servo rigidity.
4-5-9 Gain
Reduction
P control switching function Switches the speed control loop automatically from PI
control to P control to lower servo rigidity. (The
switching conditions can be selected.)
4-8-10 P Control
Switching
Operation Chapter 4

 Loading...
Loading...





