4-112
Note 2. A torque will be generated that accelerates the Servomotor in the forward direction if torque
feed-forward is applied with a positive (+) voltage. Be sure that the polarity is correct because
errors such as reverse Servomotor rotation or oscillation will occur if the feed-forward is ap-
plied with a polarity opposing the acceleration direction.
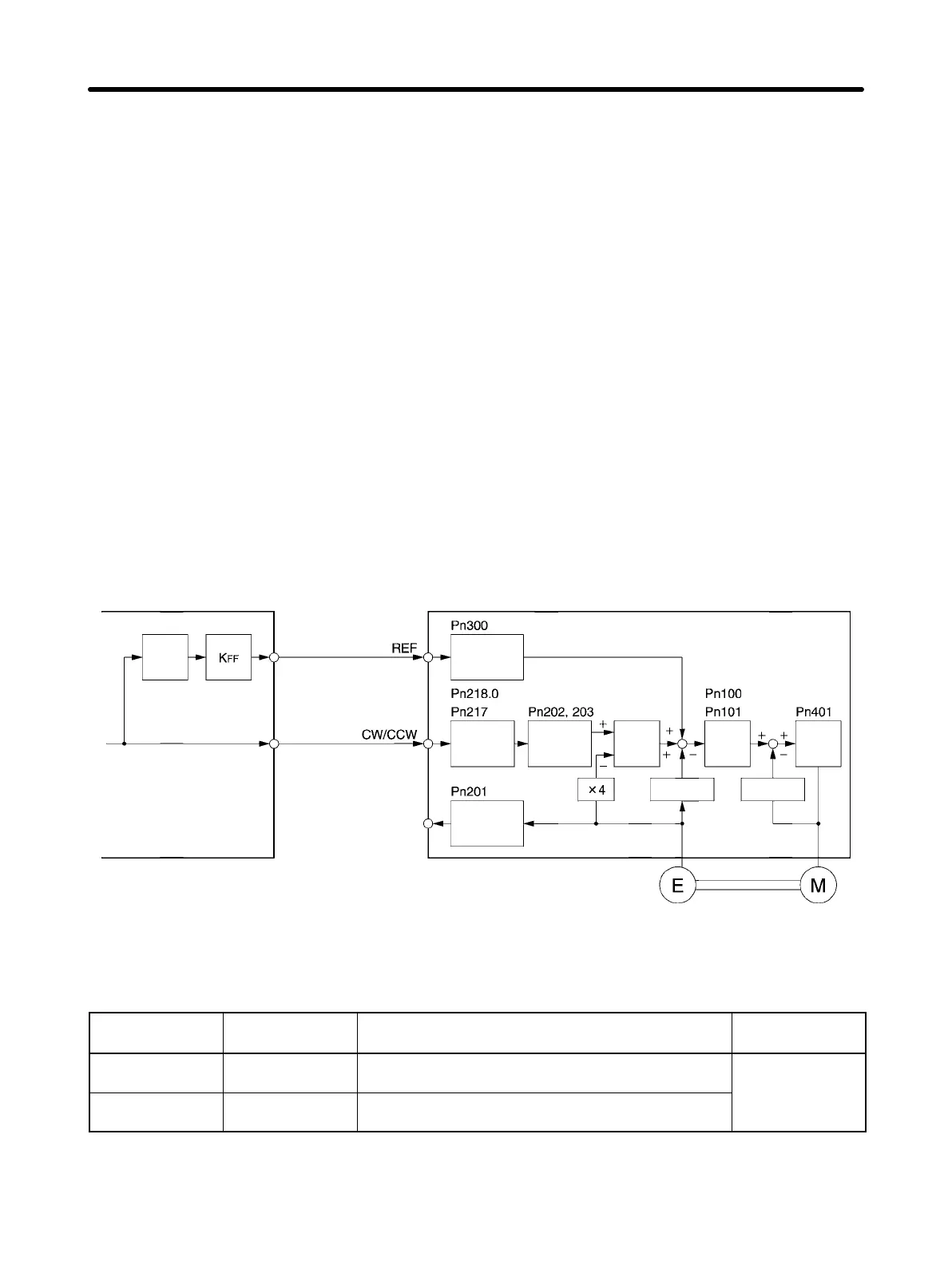
4-8-4 Speed Feed-forward Function (Position)
H Functions
• This function shortens positioning time by adding the REF (speed command input) value to the speed
loop.
• Normally, the differential value for the position command (pulse train command) is generated in the
controller, and input to REF.
• If the feed-forward amount (REF voltage) is too large, an overshoot may occur, so adjust Pn300
(speed command scale) as required.
Speed Feed-forward Function Block Diagram
Host Controller
Differ-
ential
Position command
Speed feed-forward
Command
pulses
Encoder output
Speed com-
mand scale
Electronic
gear ratio
(G1/G2)
Encoder di-
viding rate
Deviation
counter
Speed
detection
Current
detection
Current
loop
Speed
loop
Servo Driver
Command
pulse factor
H Parameters Requiring Settings
Parameter No. Parameter
name
Explanation Example
Pn207.1 Speed command
input switching
Set Pn207.1 to 1 (use REF as speed torque
feed-forward input).
4-4-4 Parameter
Details
Pn300 Speed command
scale
Adjust the speed feed-forward amount. (See note.)
Note The default setting is 1000 (x 0.01 V / rated number of revolutions).
Operation Chapter 4

 Loading...
Loading...





