4-111
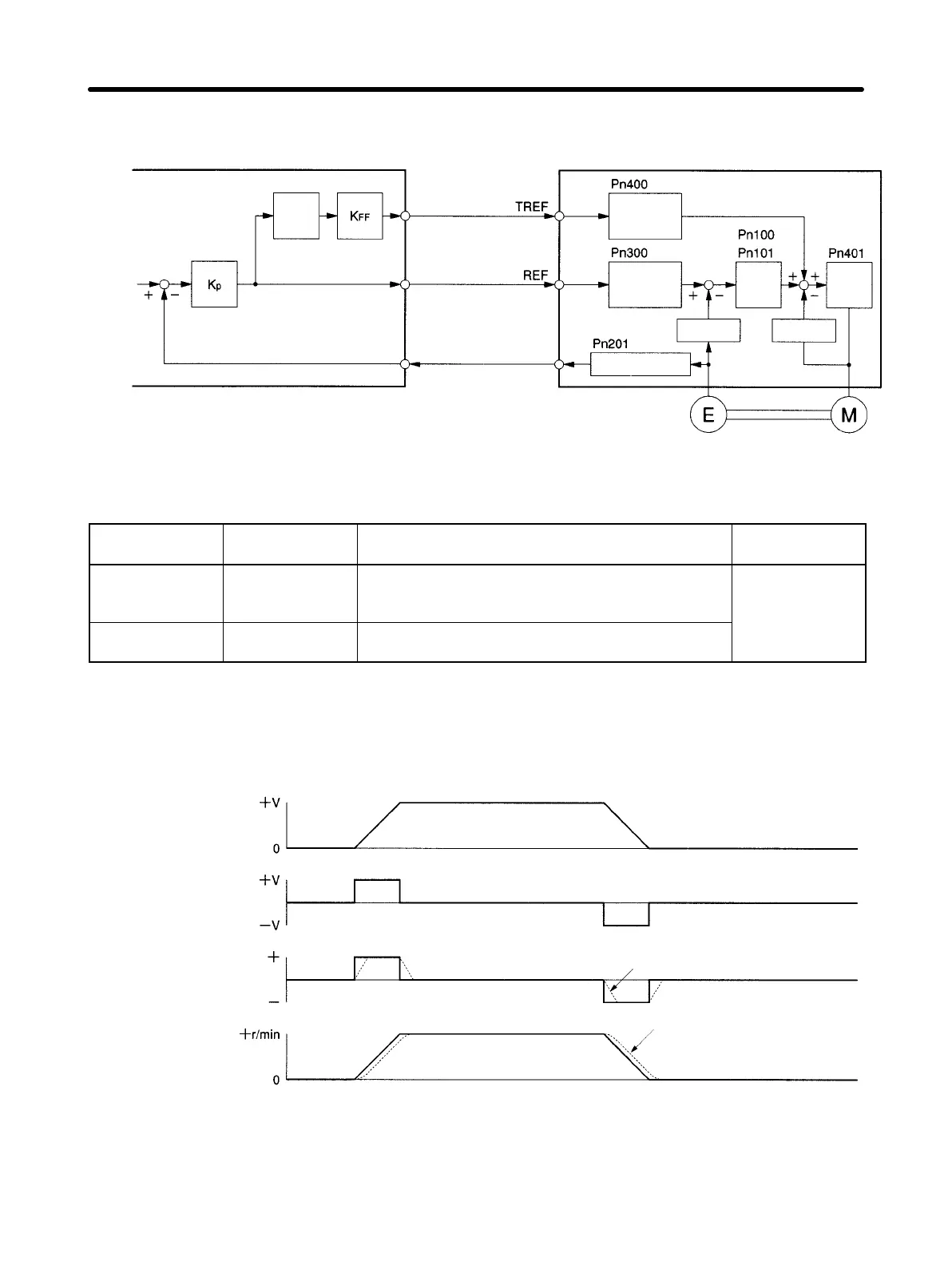
Torque Feed-forward Function Block Diagram
Host Controller
Position command
Differ-
ential
Torque feed-forward
Speed command
Encoder output
Speed
detection
Speed com-
mand scale
Torque com-
mand scale
Servo Driver
Speed
loop
Current
detection
Current
loop
Encoder dividing rate
H Parameters Requiring Settings
Parameter No. Parameter
name
Explanation Reference
Pn002.0 Torque
command input
switching
Set Pn002.0 to 2 (use TREF as torque
feed-forward input)
4-4-4 Parameter
Details
Pn400 Torque
command scale
Adjust the torque feed-forward amount. (See note.)
Note The default setting is 30 (x 0.1 V / rated torque).
H Operation
REF
(speed command input)
TREF
(torque feed-forward input)
Servomotor output torque
Servomotor operation
Without the torque
feed-forward function
Without the torque
feed-forward function
Note 1. If torque feed-forward is input when the Servomotor’s rotation speed is fixed, the rotation
speed won’t match the speed command. Design the Controller’s circuit so that torque feed-
forward is applied only when the Servomotor is accelerating or decelerating.
Operation Chapter 4

 Loading...
Loading...





