Motion sequence and axes Section 1-8
29
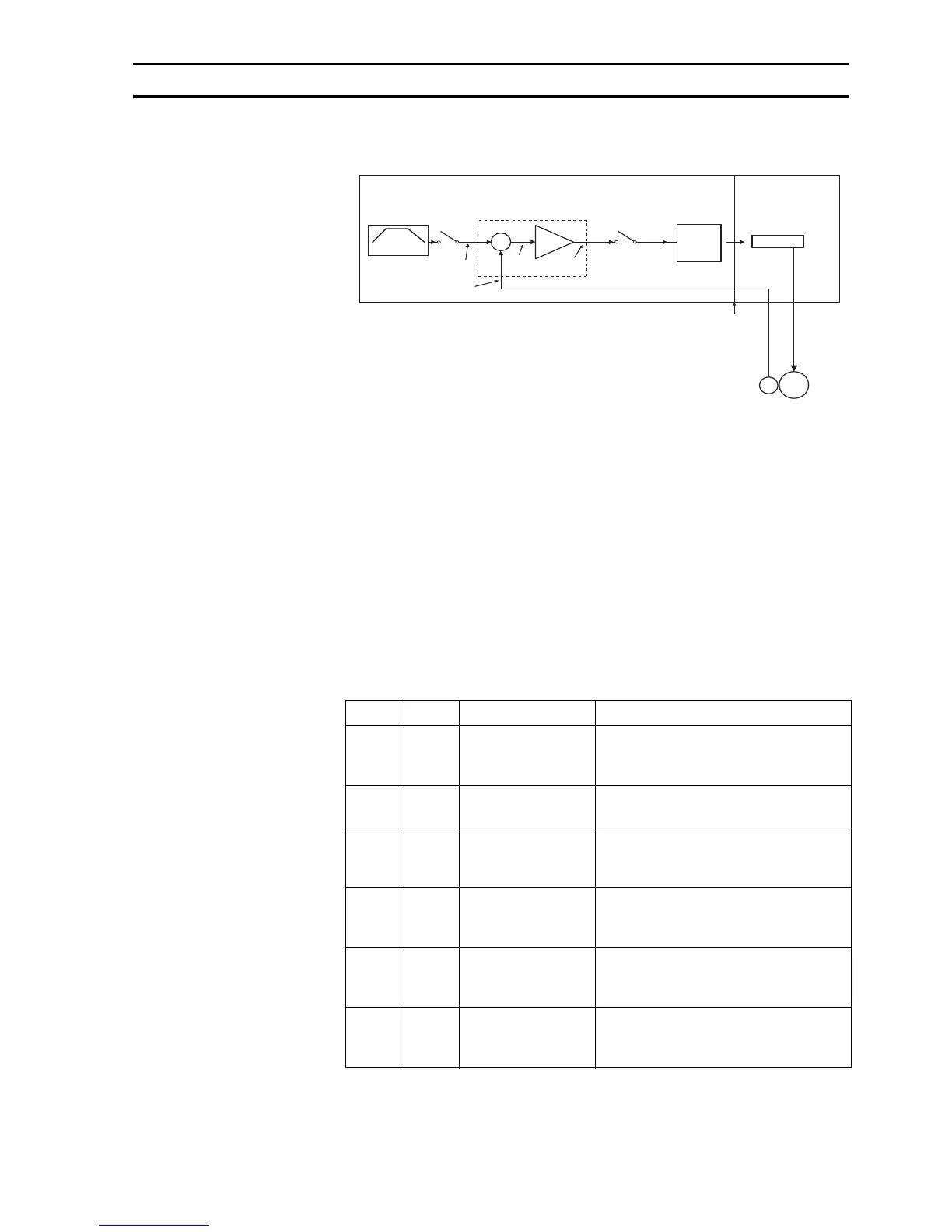
1-8-4-10 Inverter axis ATYPE=49
This type allows Inverters (with built-in encoder interface) to be controlled on
the MECHATROLINK-II bus as servo axes.
From the controller point of view, Inverter axes are handled the same as servo
axes in MECHATROLINK-II Speed Mode (ATYPE=44).
Unlike the other axis types, this Inverter axis must be defined
programmatically with function 8 of the command INVERTER_COMMAND.
The Speed command to the Inverter and the feedback from the encoder is
refreshed in the Inverter with a few milliseconds delay. This is an inverter
limitation. This means that the use of the Inverter is similar to the use of a
Servo Driver, but the performance is lower.
1-8-4-11 Summary of axis types and control modes
The following table lists the axis types and their recommended modes for
speed control, position control and torque control.
/i
INVERTER
+
_
M
E
CJ1W-MCH72
Position loop
Demanded
position
Measured
position
Profile generator
Following
error
Speed
command
DPRAM
REFRESH
EVERY 5ms
ML-II
Speed
command
Speed Loop
SERVO = OFF
SERVO = OFF
ATYPE SERVO Mode Comment
40 OFF Position
(MECHATROLINK-II)
The position loop is closed in the Servo
Driver. No new motion command is
allowed.
40 ON Position
(MECHATROLINK-II)
Recommended mode for position control
with MECHATROLINK-II axes.
41 OFF Speed
(MECHATROLINK-II)
Recommended mode for speed control
with MECHATROLINK-II axes. Set the
speed with S_REF.
41 ON Position
(MECHATROLINK-II)
The position loop is closed in Trajexia.
This gives lower performance than closing
the position loop in the Servo Driver.
42 OFF Torque
(MECHATROLINK-II)
Recommended mode for torque control
with MECHATROLINK-II axes. Set the
torque with T_REF.
42 ON Position via torque
(MECHATROLINK-II)
The position loop is closed in Trajexia.
The output of the position loop is sent as
the torque reference to the Servo Driver.
 Loading...
Loading...









