OB7 Collaborative Robot User Manual Version 0.6
OB7 Control Functions / 80
When placing an object into another machine, it is sometimes necessary for the machine to take hold
of the object. For example: a machine tool must close its chuck or vice. Use this selection to activate
another machine during the place operation.
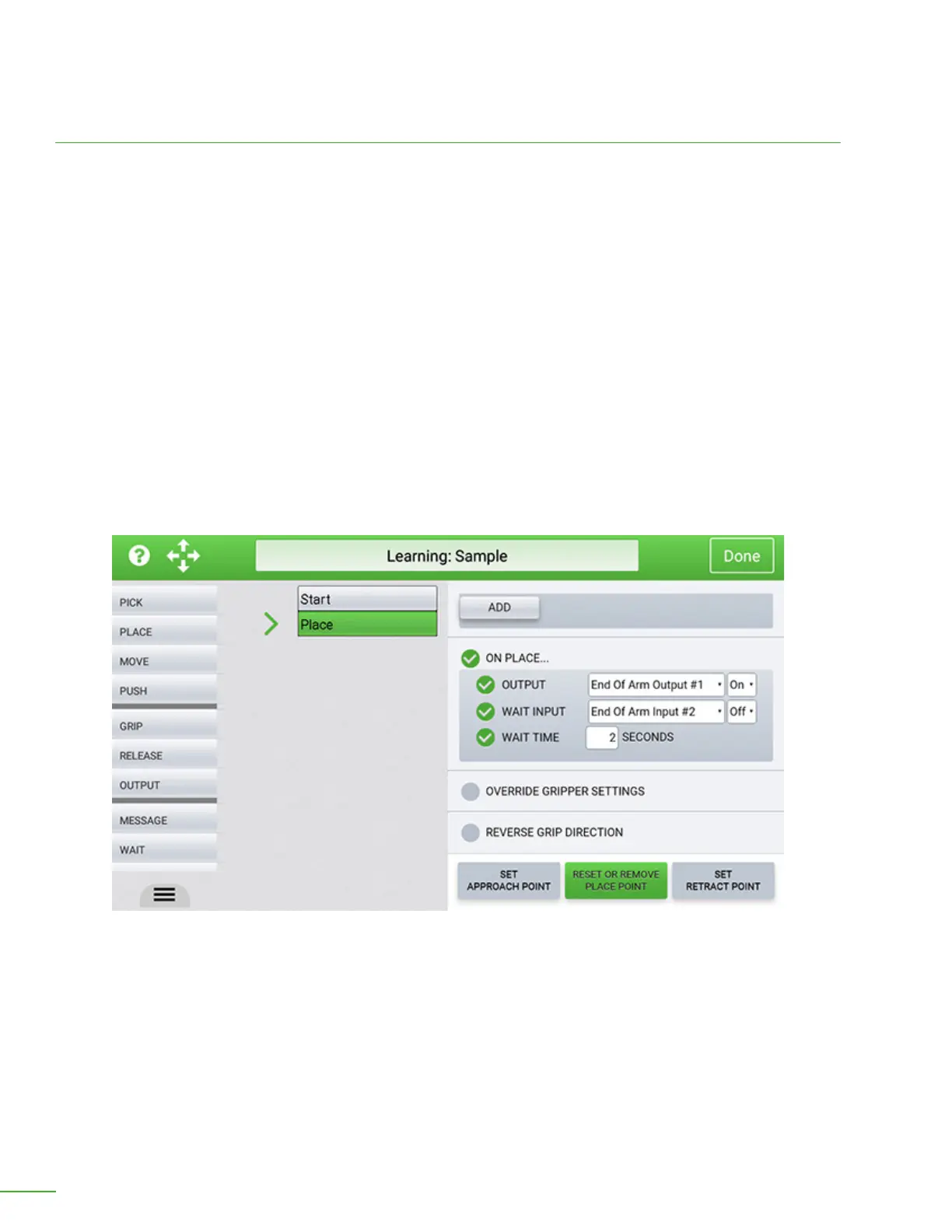
On Place:
Output: Check here in order to signal the other machine to grasp the object. Select the output to use
for this signal.
Wait Input: Check here if it is necessary to wait for the machine to signal that it has grasped the
object. Select the input to use for this signal.
Wait Time: Check here to add a time delay before moving away aer releasing the object.
Specify the “Place” options if OB7 needs to place an object into another machine.
 Loading...
Loading...