74 Rockwell Automation Publication 750-RM100A-EN-P - August 2019
Chapter 9 Reference Motion Planners
Step 4—Configure Dynamic Limits (optional)
Adjust parameters described in the following table to set and balance dynamic limits.
Parameters 10/11:1392 [Max Speed Fwd] and 10/11:1393 [Max Speed Rev] apply to all
move types, while the remaining parameters apply when 10/11:931 [Ref Move Type] =
‘SineSquared’, ‘Poly5’, or ‘Cubic’.
Limits are typically set high to protect drive systems from dynamics they cannot handle.
Slower moves are unaffected by limits, however move dynamics approach limits and then
become limited as move times are decreased or move distance is increased.
You can also apply limits proactively by intentionally lowering them to balance dynamics
and energy. When limited, a dwell is added to ensure the correct area under the curve and
therefore the correct trajectory. The final move time is automatically increased for best
performance if required when inputs generate constrained circumstances. Moves will
smoothly transition in and out of velocity and acceleration limits when 10/11:931 [Ref
Move Type] = ‘SineSquared’, ‘Poly5’, or ‘Cubic’.
The following example shows what happens when acceleration and deceleration limits are
lowered below what is required by an unconstrained 2 second move.
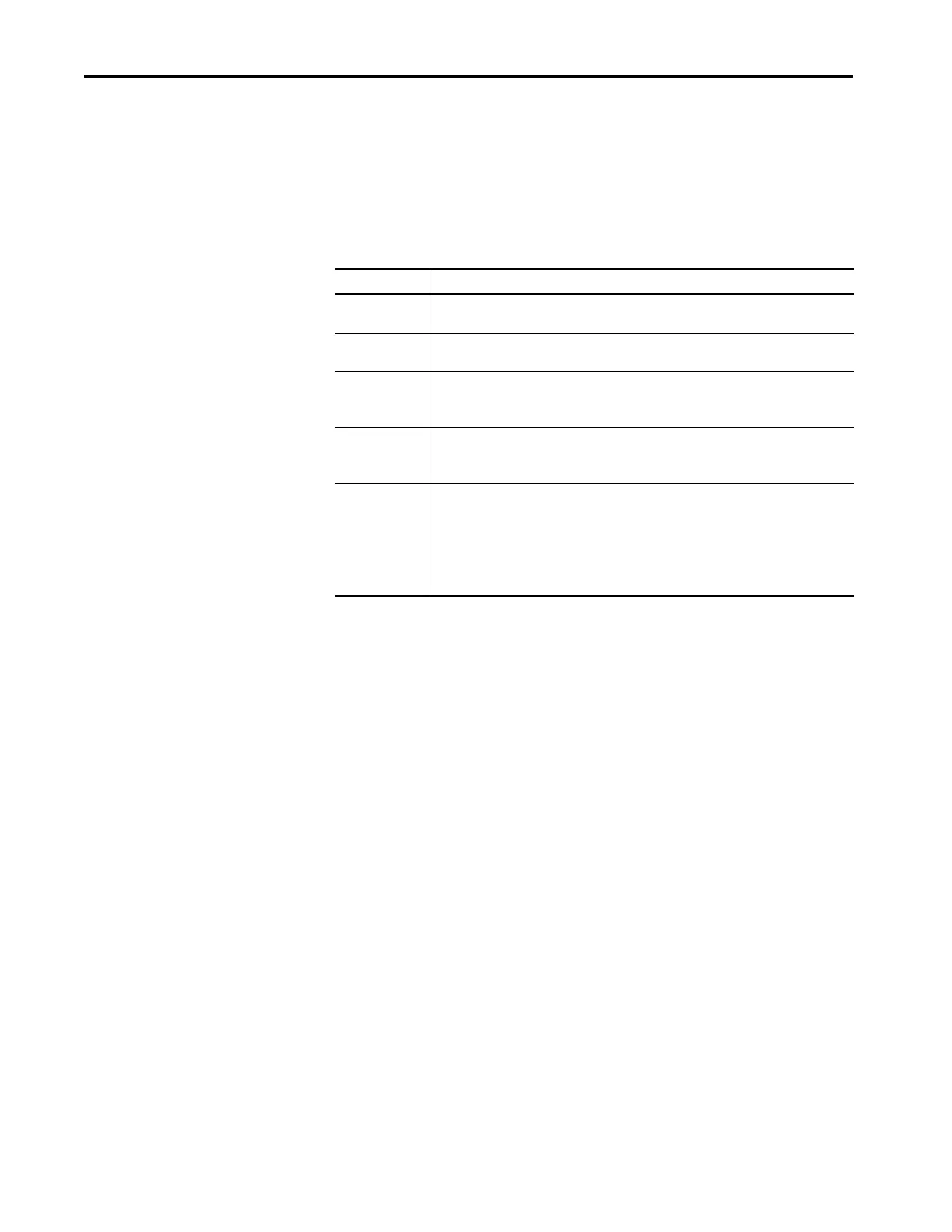
Table 27 - PTP Dynamic Limit and Balance Parameters
Parameter Description
10/11:1392
[Max Speed Fwd]
Enter the maximum forward speed limit coming from the position reference.
10/11:1393
[Max Speed Rev]
Enter the maximum reverse speed limit coming from the position reference.
10/11:936
[Ref Max Accel]
Enter the maximum acceleration limit for position and velocity reference commands.
This value only affects commands that are generated when 10/11:931 [Ref Move Type] =
‘SineSquared’, ‘Poly5’, or ‘Cubic’.
10/11:937
[Ref Max Decel]
Enter the maximum deceleration limit for position and velocity reference commands.
This value only affects commands that are generated when 10/11:931 [Ref Move Type] =
‘SineSquared’, ‘Poly5’, or ‘Cubic’.
10/11:932
[RefEnergyBalance]
Enter a skew factor applied to position and velocity reference commands that shifts the
acceleration and deceleration peaks forward or backward in time. A lower value allows the
acceleration peak to occur at lower velocity for saving energy. A higher value allows the
acceleration peak to occur at higher velocity for more aggressive moves. The deceleration peak
mirrors the acceleration peak.
This value only affects commands that are generated when 10/11:931 [Ref Move Type] =
‘SineSquared’, ‘Poly5’, or ‘Cubic’.

 Loading...
Loading...











