Rockwell Automation Publication 750-RM100A-EN-P - August 2019 73
Reference Motion Planners Chapter 9
Time Based Move
When 10/11:933 [Ref Time Base] = ‘Time’, you can enter acceleration and deceleration
times directly using parameters in the following table. However, this only affects
commands that are generated when 10/11:931 [Ref Move Type] = ‘SineSquared’, ‘Poly5’,
or ‘Cubic’. Rate based calculations are always applied when 10/11:931 [Ref Move Type]
= ‘LinScurve’.
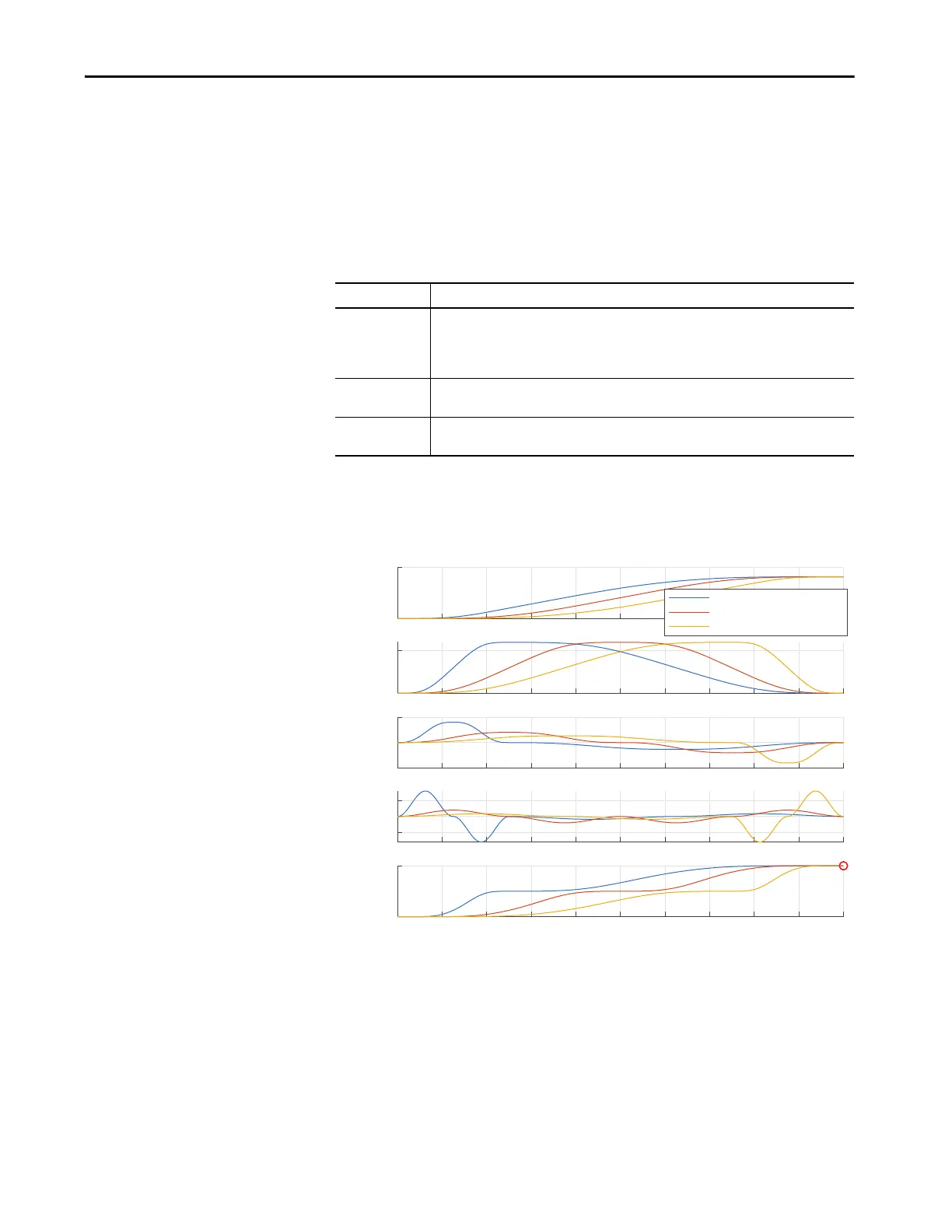
You can completely decouple acceleration and deceleration parts of a move, making it
easier to generate asymmetric move profiles.
Figure 20 - Asymmetric Index Moves
Note the following relationships:
• Asymmetry trades maximum acceleration and jerk for minimum
acceleration and jerk
• Asymmetry lets you adjust maximum and minimum acceleration and jerk
times
• Asymmetry does not affect energy directly
Table 26 - PTP Time Based Move Parameters
Parameter Description
10/11:933
[Ref Time Base]
Select how acceleration and deceleration times are calculated for position and velocity reference
commands.
‘Time’ (1) – 10/11:934 [Ref Accel Time] and 10/11:935 [Ref Decel Time] are applied directly as
acceleration and deceleration times.
10/11:934
[Ref Accel Time]
Enter the acceleration time that is directly applied to position and velocity reference commands
when P933 [Ref Time Base] = ‘Time’.
10/11:935
[Ref Decel Time]
Enter the deceleration time that is directly applied to position and velocity reference commands
when P933 [Ref Time Base] = ‘Time’.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
5000
Acc= 0.5sec Dec= 1.5sec
Acc= 1.0sec Dec= 1.0sec
Acc= 1.5sec Dec= 0.5sec
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
50
Vel
[RPM]
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-5
0
5
Accel
[rev/sec
2
]
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-20
0
20
Jerk
[rev/sec
3
]
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2

 Loading...
Loading...











