72 Rockwell Automation Publication 750-RM100A-EN-P - August 2019
Chapter 9 Reference Motion Planners
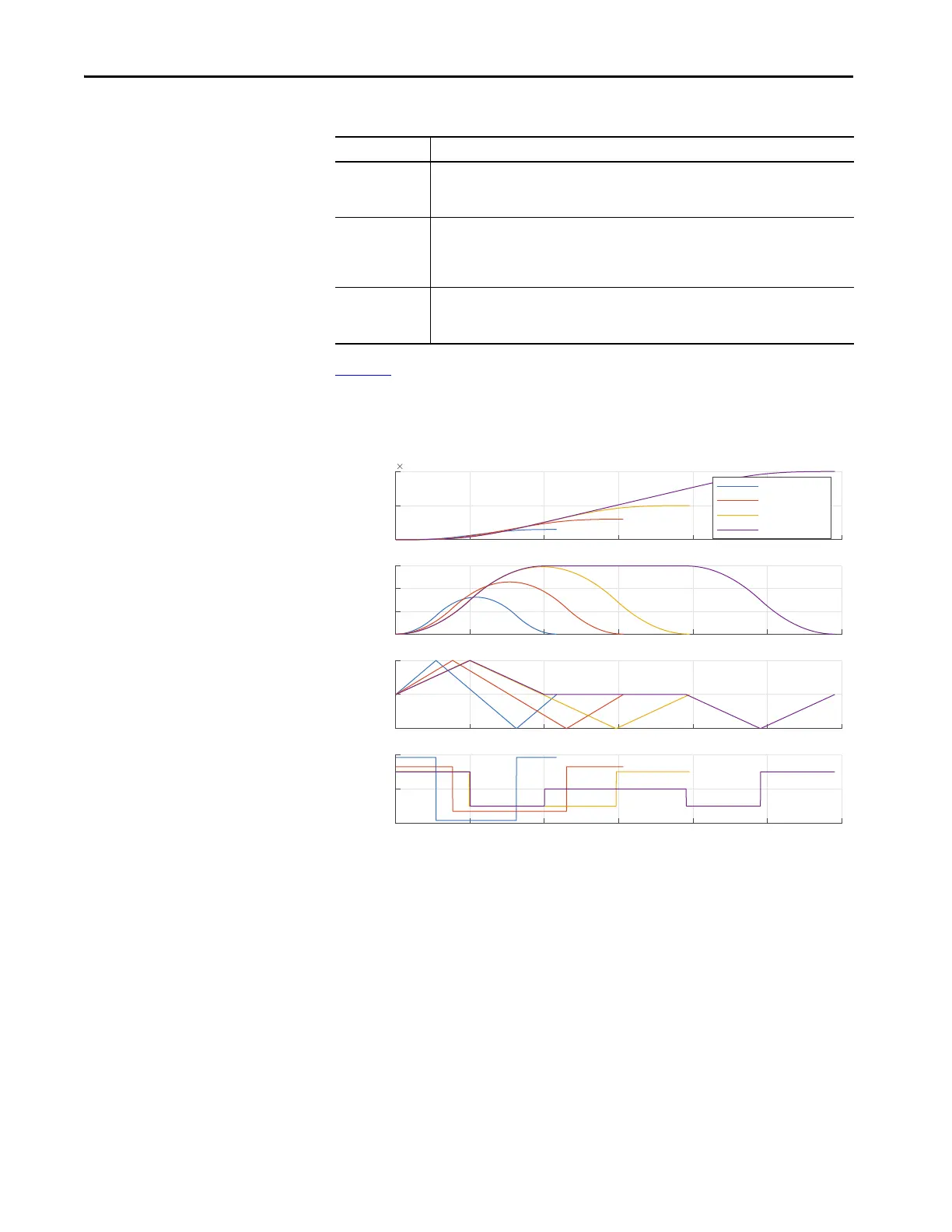
Figure 19 shows different distances for a LinScurve indexing move with 1 second
acceleration and deceleration rates and a maximum velocity of 150 RPM (5Hz for an
1800 RPM motor).
Figure 19 - Rate Based Index Moves with Different Distances
Note the following relationships:
• Acceleration and deceleration times are calculated based on a constant
maximum acceleration (velocity rate).
• Once the move distance increases enough to hit maximum velocity 10/
11:1392 [Max Speed Fwd], the acceleration rate remains constant.
• Rate based move times are good when continually indexing to various
target distances.
10/11:1399
[PTP Decel Time]
Enter the deceleration ramp time used by the Point to Point (PTP) position planner.
This value is the time to go from the velocities in 10/11:1392 [Max Speed Fwd] or 10/11:1393
[Max Speed Rev] to zero.
10/11:1402
[PTP Vel Override]
Enter a value to set the multiplier to both forward parameters 10/11:1392 [Max Speed Fwd] and
10/11:1393 [Max Speed Rev].
This parameter applies to the speed limits when Bit 0 ‘Vel Override’ of 10/11:1381 [PTP Control]
is set.
10/11:1403
[PTP S Curve]
Enter a value to set the S-curve duration for Point-to-Point (PTP) position reference commands.
This value is used to calculate acceleration and deceleration rates equivalent to LinScurve
behavior when 10/11:933 [Ref Time Base] = ‘Rate’.
Table 25 - PTP Rate Based Move Parameters
Parameter Description
3000 counts
6000 counts
10000 counts
20000 counts
0 0.5 1 1.5 2 2.5
-5
0
5
Accel
[rev/sec
2
]
0 0.5 1 1.5 2 2.5

 Loading...
Loading...











